Shahab Kaynama
I have moved to Clearpath Robotics since Novermber 2014. Page last modified on 29/08/2015.
Contact: [lastname]@berkeley.edu or @ece.ubc.ca
I live and breathe controls and robotics. My work lies in the intersection of control systems, computer science, and mathematical optimization. Between 2012-14 I was a postdoctoral researcher at UC Berkeley under Prof. Claire Tomlin. I received my Ph.D. in 2012 in Electrical and Computer Engineering from the University of British Columbia where I worked under Profs. Meeko Oishi, Ian Mitchell, and Guy Dumont. I have an M.Sc. (2006) in Advanced Control and Systems Engineering from the University of Manchester. Outside of work I enjoy playing chess, reading books, playing the guitar, and exercising. My favourite sport is tennis.
The Safe Learning Project
I get asked a lot of questions about this project, so here is a quick snippet of what it is all about.
Most machine learning algorithms in robotics either completely lack formal guarantees of safety, or else impose stringent conditions on the system. For example, they might assume that we can always safely rely on the observed data; that our knowledge of the environment or the system improves monotonically, and that our uncertainty constantly decreases as we collect more data. The problem is that in the real world one can never fully trust observed data.
This is where our safe-learning algorithm shines: It provides a systematic method to preserve safety for generic nonlinear dynamics even in the existence of uncertainty or our lack of sufficient observation. As a result, we can run our favourite machine learning algorithm to improve performance of the system and have the peace of mind that the system could never go unstable or jeopardize safety (both of itself and its surrounding environment). For more information please see this paper.
Stuff I do is so stuff like this never happens (again!): The STARMAC platform, Hybrid Systems Lab, UC Berkeley, Feb. 2014. Creative director: The talented J. F.-Fisac.
Safety Analysis and Synthesis in Robotics
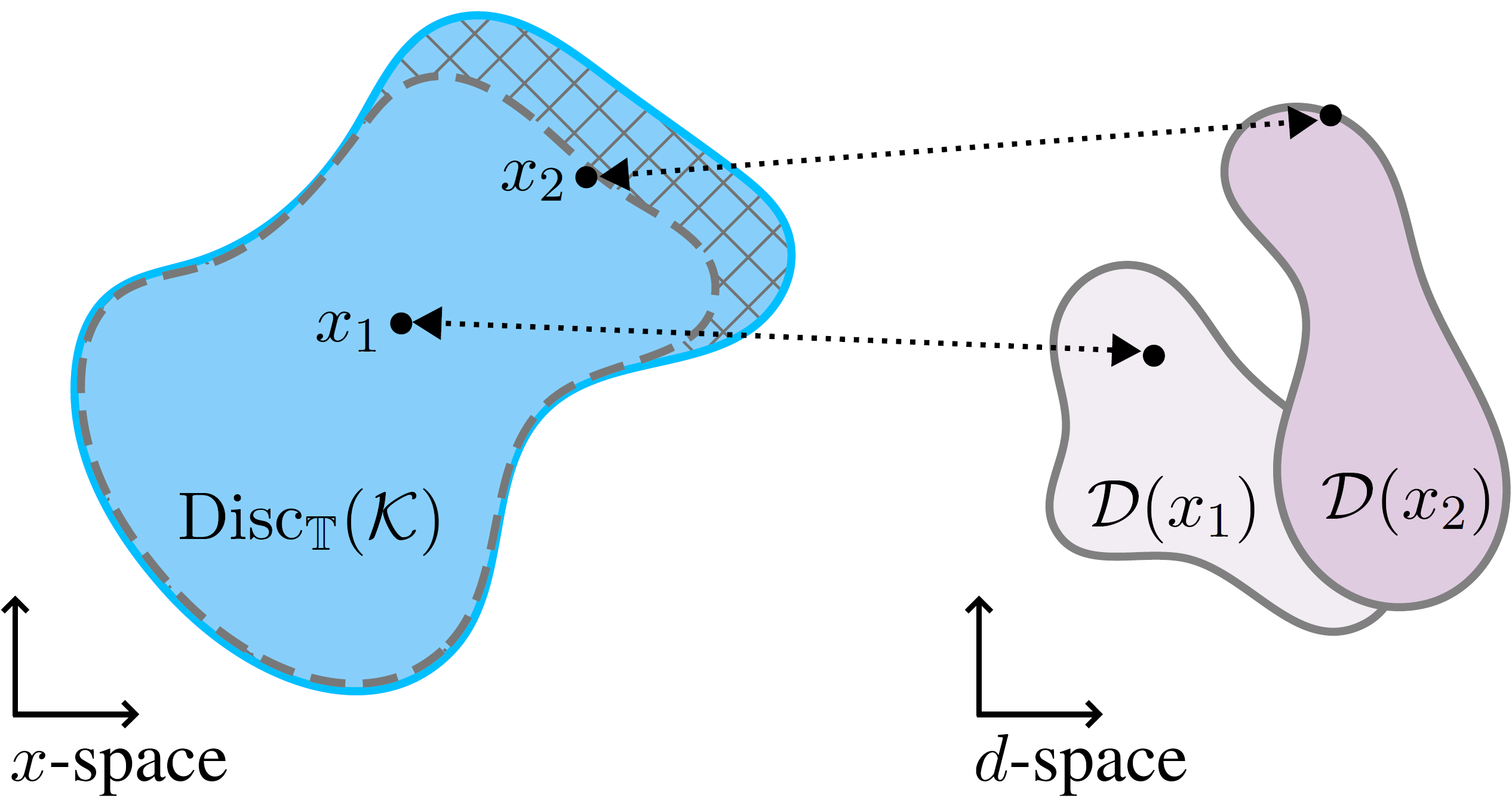
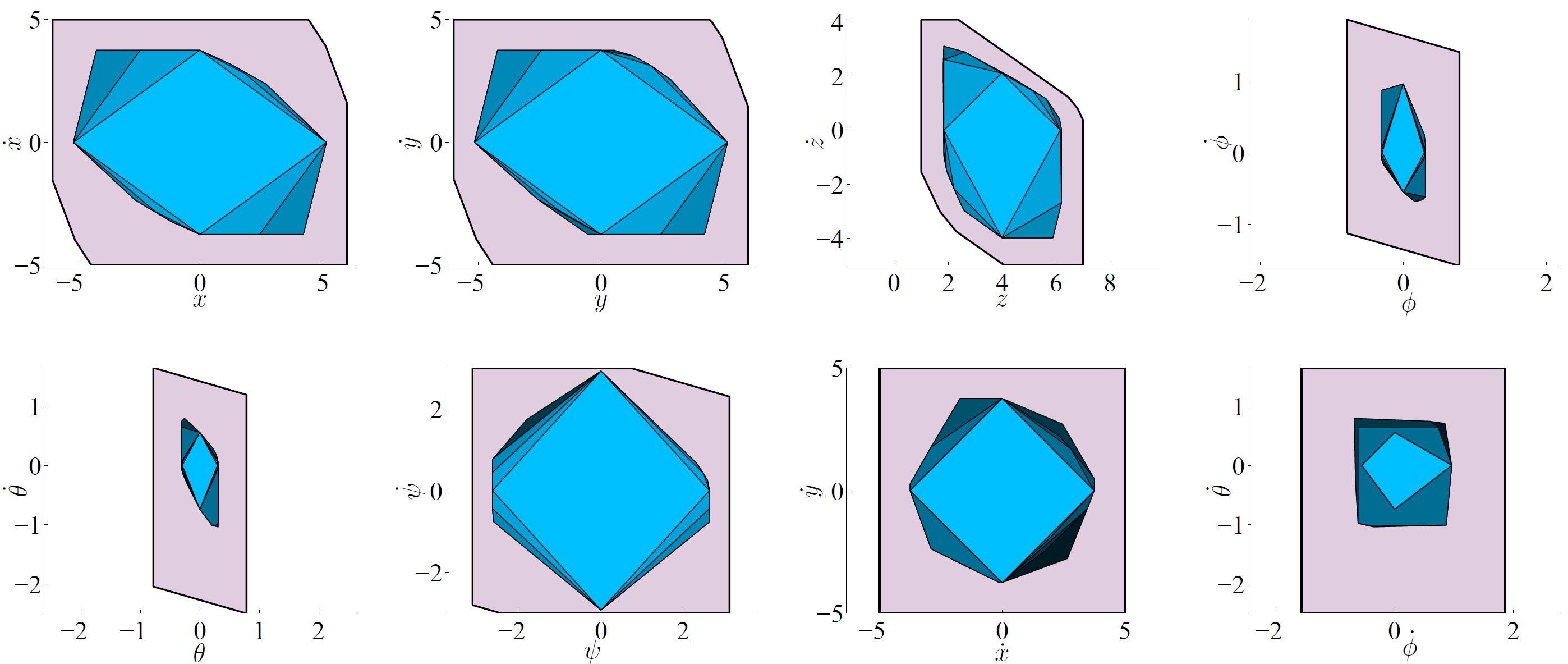
Computing the set of states in which existence of a safety-preserving control law is guaranteed is extremely desirable when it comes to ensuring safe operation of robotic systems (particularly if those systems are to operate among humans; for example in the case of self-driving cars or materials handling robots on the factory floor). Yet, providing guarantees of safety is a challenging task in high dimensions. The main problem is due to Bellman's "curse of dimensionality": the complexity of computing the safe set increases exponentially with the dimension of the state.
My research in this area focused on finding scalable techniques for a class of robotic systems such that 1) we can efficiently compute a correct (conservative) approximation of the safe set, and 2) synthesize the corresponding safety-preserving control laws in a manner that is permissive. This allows us to "wrap" the safety algorithm around any existing control infrastructure and immediately guarantee a safe operation of the system.
Selected Publications (updated sporadically)
Doctoral Thesis:
- S. Kaynama, "Scalable techniques for the computation of viable and reachable sets: Safety guarantees for high-dimensional linear time-invariant systems," UBC July 2012 [ PDF ] [ Permalink ] [ Errata ]
#tags: robotics, healthcare, guaranteed safety, constraint satisfaction, high dimensional systems
International Journal Articles:
- S. Kaynama, J. Gillula, C. J. Tomlin, "A sampling-based approach to scalable constraint satisfaction in linear sampled-data systems—Part I: computation," submitted to Automatica, 2014 [ Preprint ]
#tags: robotics, guaranteed safety, constraint satisfaction, high dimensional systems, sampled-data systems
- S. Kaynama, I.M. Mitchell, M. Oishi, and G.A. Dumont, "Scalable safety-preserving robust control synthesis for continuous-time linear systems," to appear in IEEE Transactions on Automatic Control, (submitted in 2013; accepted in modified form in 2014) [ Preprint ] [ Poster presented at HSCC'13 ]
#tags: robotics, guaranteed safety, constraint satisfaction, high dimensional systems
- I.M. Mitchell, S. Kaynama, M. Chen, M. Oishi, "Safety preserving control synthesis for sampled data systems," Nonlinear Analysis: Hybrid Systems, vol. 10, pp. 63–82, 2013 [ Preprint ] [ Publisher's version ]
#tags: guaranteed safety, constraint satisfaction, high dimensional systems, sampled-data systems
- J. Maidens, S. Kaynama, I.M. Mitchell, M. Oishi, and G.A. Dumont, "Lagrangian methods for approximating the viability kernel in high-dimensional systems," Automatica, vol. 49, no. 7, pp. 2017–2029, 2013 [ Preprint ] [ Publisher's version ]
#tags: healthcare, guaranteed safety, constraint satisfaction, high dimensional systems
- S. Kaynama and M. Oishi, "A modified Riccati transformation for decentralized computation of the viability kernel under LTI dynamics," IEEE Transactions on Automatic Control, vol. 58, no. 11, pp. 2878–2892, 2013 [ Preprint ] [ Publisher's version ]
#tags: guaranteed safety, constraint satisfaction, high dimensional systems
- S. Kaynama and M. Oishi, "Complexity reduction through a Schur-based decomposition for reachability analysis of linear time-invariant systems," International Journal of Control, vol. 84, no. 1, pp. 165–179, 2011. [ Preprint ] [ Publisher's version ]
#tags: guaranteed safety, constraint satisfaction, high dimensional systems
Refereed International Conference Proceedings:
- I.M. Mitchell and S. Kaynama, "An improved algorithm for robust safety analysis of sampled data systems: Now robust to sample time jitter," in Proc. Hybrid Systems: Computation and Control, Seattle, WA, April 14–16, 2015.
#tags: robotics, guaranteed safety, constraint satisfaction, high dimensional systems, sampled-data systems
- A.K. Akametalu, J. F.-Fisac, J.H. Gillula, S. Kaynama, M.N. Zeilinger, and C.J. Tomlin, "Reachability-based safe online learning with Gaussian processes," Proc. 53rd IEEE Conference on Decision and Control, Los Angeles, CA, Dec 15–17, 2014. [ Preprint ]
#tags: robotics, guaranteed safety, constraint satisfaction, machine learning
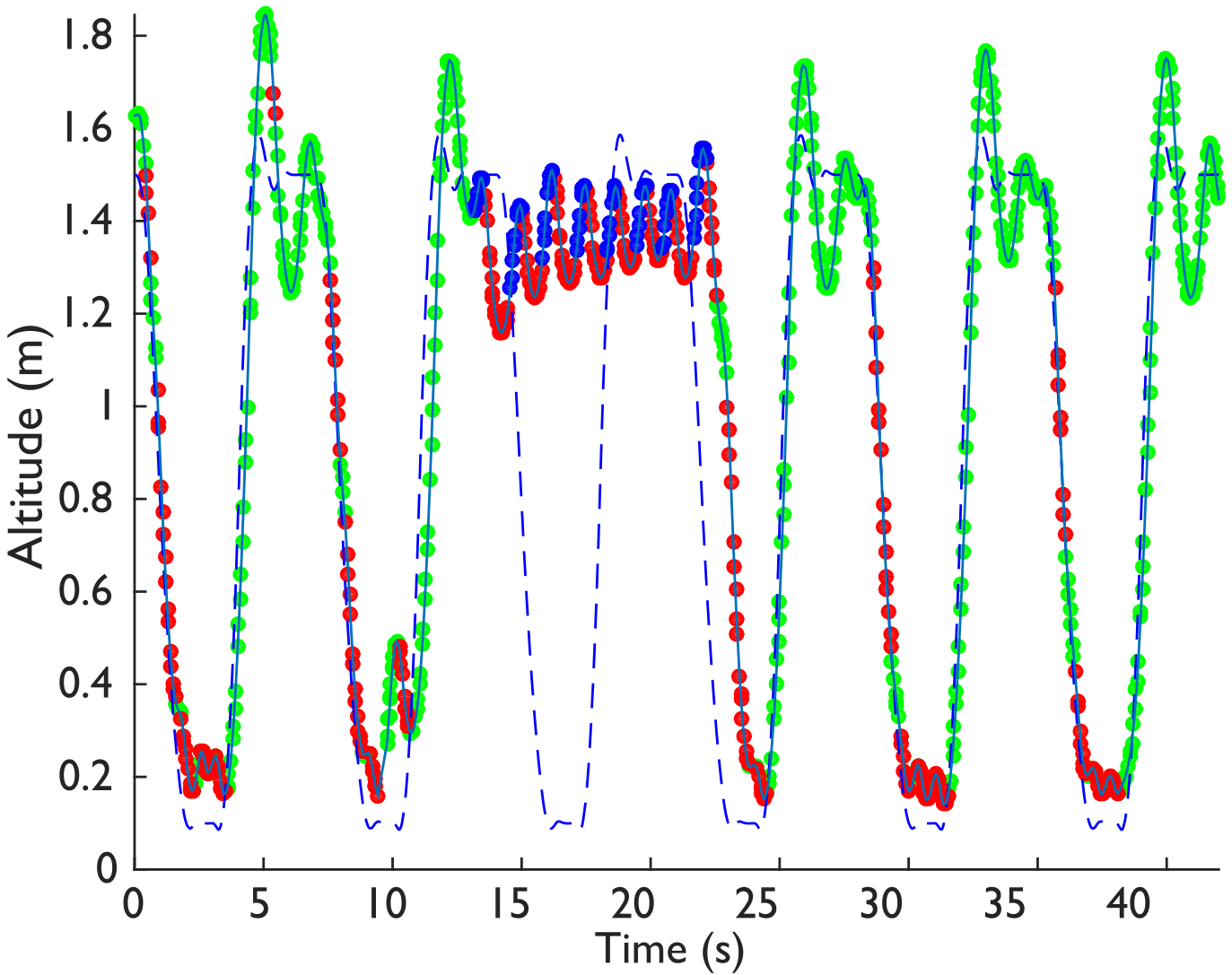
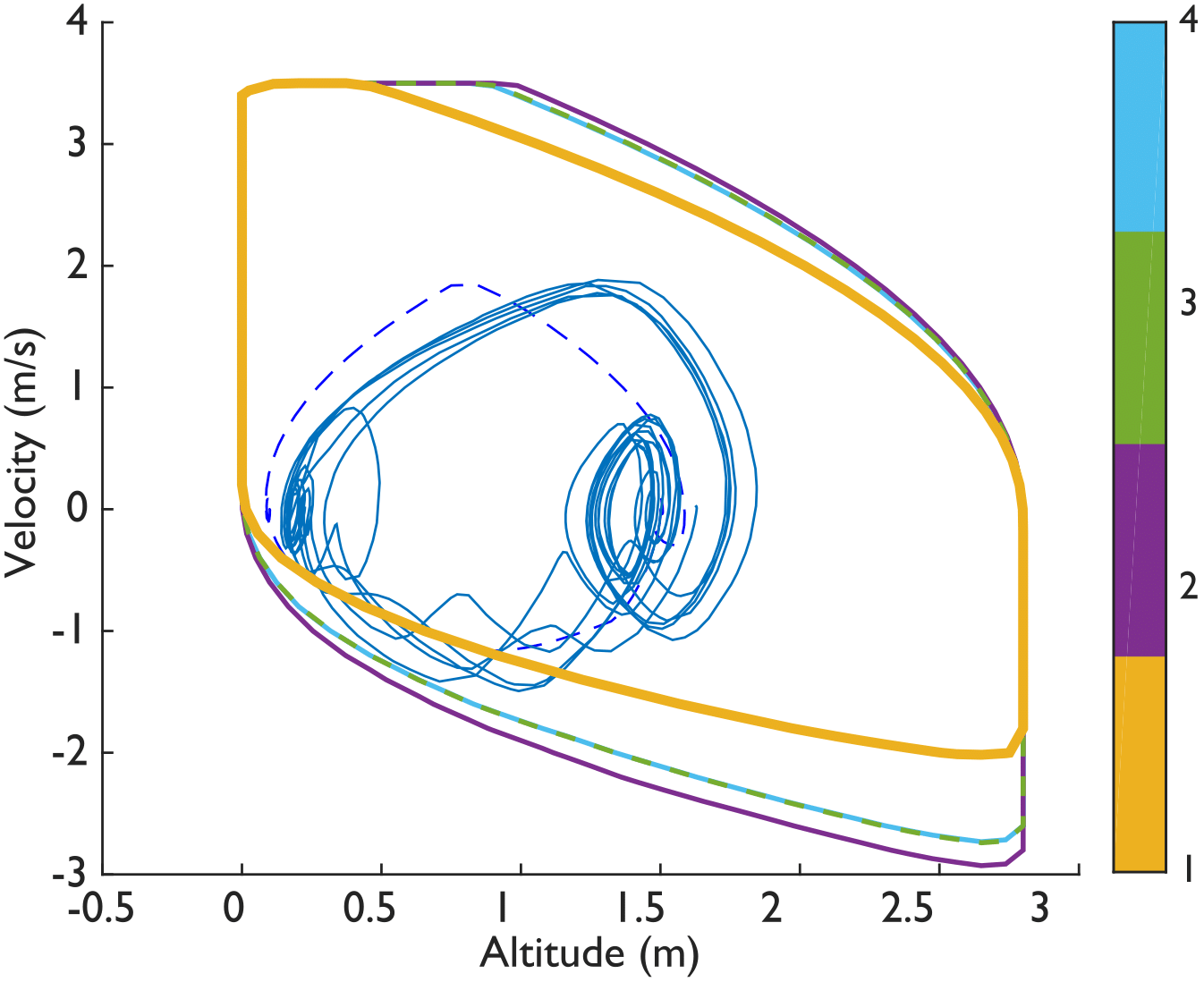
- S. Kaynama and C.J. Tomlin, "Benchmark: Flight envelope protection in autonomous quadrotors," in International Workshop on Applied Verification for Continuous and Hybrid Systems (cps-vo.org/group/ARCH), Part of CPSWeek, Berlin, Germany, April 15–17, 2014. [ Preprint ] [ Slides ] [ Code ] //Invited paper
#tags: robotics, guaranteed safety, constraint satisfaction, high dimensional systems
- J.H. Gillula, S. Kaynama, and C.J. Tomlin, "Sampling-based approximation of the viability kernel for high-dimensional linear sampled-data systems," in Proc. Hybrid Systems: Computation and Control, Berlin, Germany, April 15-17, 2014, pp. 173-182. [ Preprint ] [ MATLAB Code ]
#tags: guaranteed safety, constraint satisfaction, high dimensional systems, sampled-data systems
- C. Dabadie, S. Kaynama, and C.J. Tomlin, "A practical reachability-based collision avoidance algorithm for sampled-data systems: application to ground robots," to appear in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, September 14–18, 2014. [ Preprint ]
#tags: robotics, guaranteed safety, collision avoidance, sampled-data systems
- S. Kaynama, J.N. Maidens, M. Oishi, I.M. Mitchell, and G.A. Dumont, "Computing the viability kernel using maximal reachable sets," in Proc. Hybrid Systems: Computation and Control, Beijing, China, April 17-19, 2012, pp. 55–63. [ Preprint ] [ MATLAB Code (updated: 8/8/12) ] [ Slides ]
#tags: robotics, healthcare, guaranteed safety, constraint satisfaction, high dimensional systems
- S. Kaynama, M. Oishi, I.M. Mitchell, and G.A. Dumont, "Fixed-complexity piecewise ellipsoidal representation of the continual reachability set based on ellipsoidal techniques," in Proc. American Control Conference, Montreal, QC, June 27-29, 2012, pp. 2425–2430. [ Preprint ] [ Slides ]
#tags: healthcare, guaranteed performance, high dimensional systems
- S. Kaynama, M. Oishi, I.M. Mitchell, and G.A. Dumont, "The continual reachability set and its computation using maximal reachability techniques," in Proc. Joint IEEE Conference on Decision and Control, and European Control Conference, Orlando, FL, December 12-15, 2011, pp. 6110–6115. [ Preprint ] [ Slides ]
#tags: healthcare, guaranteed performance, high dimensional systems
- S. Kaynama and O. Kukrer. "A suboptimal discrete-time predictive current controller for a voltage-source inverter," in Proc. IEEE International Conference on Control Applications, Part of 2010 IEEE Multi-Conference on Systems and Control, Yokohama, Japan, September 8-10, 2010, pp. 632–639. [ Preprint ] [ Slides ]
#tags: industrial power electronics, back-emf estimation, load variation resilience
- S. Kaynama and M. Oishi. "Overapproximating the reachable sets of LTI systems through a similarity transformation," in Proc. American Control Conference, Baltimore, MD, June 30-July 2, 2010, pp. 1874–1879. [ Preprint ] [ Slides ]
#tags: guaranteed safety, constraint satisfaction, high dimensional systems
- S. Kaynama and M. Oishi. "Schur-based decomposition for reachability analysis of linear time-invariant systems," in Proc. IEEE Conference on Decision and Control, Shanghai, China, December 16-18, 2009, pp. 69–74. [ Preprint ] [ Slides ]
#tags: guaranteed safety, constraint satisfaction, high dimensional systems
Copyright (c) 2008-14