#include <stdio.h>#include <assert.h>#include <sys/types.h>#include <time.h>#include "heapsort.h"#include "util.h"#include "vpr_types.h"#include "globals.h"#include "mst.h"#include "route_export.h"#include "route_common.h"#include "route_directed_search.h"#include "stats.h"#include "draw.h" Include dependency graph for route_directed_search.c:
Include dependency graph for route_directed_search.c:
Go to the source code of this file.
Defines | |
| #define | ROUND_UP(x) (ceil (x - 0.001)) |
Functions | |
| static boolean | directed_search_route_net (int inet, float pres_fac, float astar_fac, float bend_cost, t_mst_edge **mst) |
| static int | directed_search_expand_trace_segment (struct s_trace *start_ptr, int target_node, float astar_fac, int inet, int remaining_connections_to_sink) |
| static void | directed_search_expand_neighbours (struct s_heap *current, int inet, float bend_cost, int target_node, int highfanout_rlim, float astar_fac) |
| static void | directed_search_add_source_to_heap (int inet, int target_node, float astar_fac) |
| static float | get_directed_search_expected_cost (int inode, int target_node) |
| static int | get_expected_segs_to_target (int inode, int target_node, int *num_segs_ortho_dir_ptr) |
| boolean | try_directed_search_route (struct s_router_opts router_opts, t_ivec **clb_opins_used_locally, int width_fac, t_mst_edge **mst) |
Define Documentation
| #define ROUND_UP | ( | x | ) | (ceil (x - 0.001)) |
Macro used below to ensure that fractions are rounded up, but floating point values very close to an integer are rounded to that integer.
Definition at line 690 of file route_directed_search.c.
Function Documentation
| static void directed_search_add_source_to_heap | ( | int | inet, |
| int | target_node, | ||
| float | astar_fac | ||
| ) | [static] |
Adds the SOURCE of this net to the heap. Used to start a net's routing.
Definition at line 613 of file route_directed_search.c.
{
int inode;
float back_cost, tot_cost;
inode = net_rr_terminals[inet][0]; /* SOURCE */
back_cost = 0.0 + get_rr_cong_cost(inode);
/* setting the total cost to 0 because it's the only element on the heap */
if(!is_empty_heap())
{
printf
("Error: Wrong Assumption: in directed_search_add_source_to_heap "
"the heap is not empty. Need to properly calculate source node's cost.\n");
exit(1);
}
/* WMF: path cost is 0. could use tot_cost = 0 to save some computation time, but
* for consistency, I chose to do the expected cost calculation. */
tot_cost =
back_cost + astar_fac * get_directed_search_expected_cost(inode,
target_node);
node_to_heap(inode, tot_cost, NO_PREVIOUS, NO_PREVIOUS, back_cost, OPEN);
}
Here is the call graph for this function: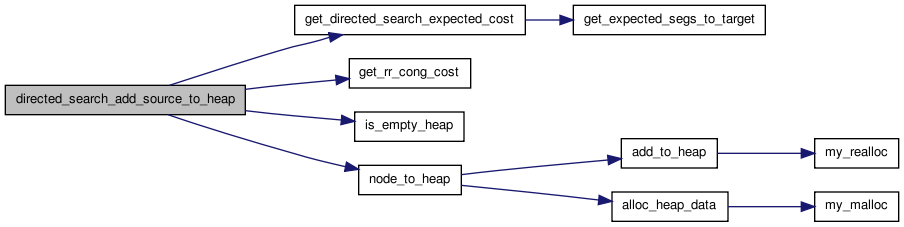 Here is the caller graph for this function:
Here is the caller graph for this function:
| static void directed_search_expand_neighbours | ( | struct s_heap * | current, |
| int | inet, | ||
| float | bend_cost, | ||
| int | target_node, | ||
| int | highfanout_rlim, | ||
| float | astar_fac | ||
| ) | [static] |
Puts all the rr_nodes adjacent to current on the heap. rr_nodes outside the expanded bounding box specified in route_bb are not added to the heap. back_cost is the path_cost to get to inode. total cost i.e. tot_cost is path_cost + (expected_cost to target sink)
Definition at line 538 of file route_directed_search.c.
{
int iconn, to_node, num_edges, inode, target_x, target_y;
t_rr_type from_type, to_type;
float new_tot_cost, old_back_pcost, new_back_pcost;
inode = current->index;
old_back_pcost = current->backward_path_cost;
num_edges = rr_node[inode].num_edges;
target_x = rr_node[target_node].xhigh;
target_y = rr_node[target_node].yhigh;
for(iconn = 0; iconn < num_edges; iconn++)
{
to_node = rr_node[inode].edges[iconn];
if(rr_node[to_node].xhigh < route_bb[inet].xmin ||
rr_node[to_node].xlow > route_bb[inet].xmax ||
rr_node[to_node].yhigh < route_bb[inet].ymin ||
rr_node[to_node].ylow > route_bb[inet].ymax)
continue; /* Node is outside (expanded) bounding box. */
if(clb_net[inet].num_sinks >= HIGH_FANOUT_NET_LIM) {
if(rr_node[to_node].xhigh < target_x - highfanout_rlim ||
rr_node[to_node].xlow > target_x + highfanout_rlim ||
rr_node[to_node].yhigh < target_y - highfanout_rlim ||
rr_node[to_node].ylow > target_y + highfanout_rlim)
continue; /* Node is outside high fanout bin. */
}
/* Prune away IPINs that lead to blocks other than the target one. Avoids *
* the issue of how to cost them properly so they don't get expanded before *
* more promising routes, but makes route-throughs (via CLBs) impossible. *
* Change this if you want to investigate route-throughs. */
to_type = rr_node[to_node].type;
if(to_type == IPIN && (rr_node[to_node].xhigh != target_x ||
rr_node[to_node].yhigh != target_y))
continue;
/* new_back_pcost stores the "known" part of the cost to this node -- the *
* congestion cost of all the routing resources back to the existing route *
* new_tot_cost
* is this "known" backward cost + an expected cost to get to the target. */
new_back_pcost = old_back_pcost + get_rr_cong_cost(to_node);
if(bend_cost != 0.)
{
from_type = rr_node[inode].type;
to_type = rr_node[to_node].type;
if((from_type == CHANX && to_type == CHANY) ||
(from_type == CHANY && to_type == CHANX))
new_back_pcost += bend_cost;
}
/* Calculate the new total cost = path cost + astar_fac * remaining distance to target */
new_tot_cost = new_back_pcost + astar_fac *
get_directed_search_expected_cost(to_node, target_node);
node_to_heap(to_node, new_tot_cost, inode, iconn, new_back_pcost,
OPEN);
}
}
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
| static int directed_search_expand_trace_segment | ( | struct s_trace * | start_ptr, |
| int | target_node, | ||
| float | astar_fac, | ||
| int | inet, | ||
| int | remaining_connections_to_sink | ||
| ) | [static] |
Adds all the rr_nodes in the entire traceback from SOURCE to all SINKS routed so far (partial routing). This allows expansion to begin from the existing wiring. The remaining_connections_to_sink value is 0 if the route segment ending at this location is the last one to connect to the SINK ending the route segment. This is the usual case. If it is not the last connection this net must make to this SINK, I have a hack to ensure the next connection to this SINK goes through a different IPIN. Without this hack, the router would always put all the connections from this net to this SINK through the same IPIN. With LUTs or cluster-based logic blocks, you should never have a net connecting to two logically-equivalent pins on the same logic block, so the hack will never execute. If your logic block is an and-gate, however, nets might connect to two and-inputs on the same logic block, and since the and-inputs are logically-equivalent, this means two connections to the same SINK.
For high-fanout nets, return the radius of the expansion bin, undefined otherwise
Definition at line 418 of file route_directed_search.c.
{
struct s_trace *tptr;
int inode, backward_path_cost, tot_cost;
int target_x, target_y;
int rlim, area;
boolean success;
target_x = rr_node[target_node].xhigh;
target_y = rr_node[target_node].yhigh;
area = (route_bb[inet].xmax - route_bb[inet].xmin) * (route_bb[inet].ymax - route_bb[inet].ymin);
if(area <= 0) {
area = 1;
}
if(clb_net[inet].num_sinks < HIGH_FANOUT_NET_LIM) {
rlim = 1;
} else {
rlim = ceil(sqrt((float)area / (float)clb_net[inet].num_sinks));
if(start_ptr == NULL) {
/* For first node, route normally since there is nothing in the current traceback path */
rlim = max(nx + 2, ny + 2);
}
}
success = FALSE;
/* determine quickly a feasible bin radius to route sink for high fanout nets
this is necessary to prevent super long runtimes for high fanout nets; in best case, a reduction in complexity from O(N^2logN) to O(NlogN) (Swartz fast router)
*/
while(success == FALSE && start_ptr != NULL) {
tptr = start_ptr;
while(tptr != NULL && success == FALSE)
{
inode = tptr->index;
if(!(rr_node[inode].type == IPIN || rr_node[inode].type == SINK)) {
if( clb_net[inet].num_sinks < HIGH_FANOUT_NET_LIM ||
(rr_node[inode].xlow <= target_x + rlim &&
rr_node[inode].xhigh >= target_x - rlim &&
rr_node[inode].ylow <= target_y + rlim &&
rr_node[inode].yhigh >= target_y - rlim)) {
success = TRUE;
}
}
tptr = tptr->next;
}
if(success == FALSE) {
if(rlim > max(nx + 2, ny + 2)) {
printf(ERRTAG "VPR internal error, net %s has paths that are not found in traceback\n", clb_net[inet].name);
exit(1);
}
/* if sink not in bin, increase bin size until fit */
rlim *= 2;
} else {
/* Sometimes might just catch a wire in the end segment, need to give it some channel space to explore */
rlim += 4;
}
}
if(remaining_connections_to_sink == 0)
{ /* Usual case. */
tptr = start_ptr;
while(tptr != NULL)
{
/* WMF: partial routing is added to the heap with path cost of 0, because
* new extension to the next sink can start at any point on current partial
* routing. However, for directed search the total cost must be made to favor
* the points of current partial routing that are NEAR the next sink (target sink) */
/* WMF: IPINs and SINKs should be excluded from the heap in this
* since they NEVER connect TO any rr_node (no to_edges), but since they have
* no to_edges, it's ok (ROUTE_THROUGHS are disabled). To clarify, see
* rr_graph.c to find out rr_node[inode].num_edges = 0 for SINKs and
* rr_node[inode].num_edges = 1 for INPINs */
inode = tptr->index;
if(!
(rr_node[inode].type == IPIN
|| rr_node[inode].type == SINK))
{
if( clb_net[inet].num_sinks < HIGH_FANOUT_NET_LIM ||
(rr_node[inode].xlow <= target_x + rlim &&
rr_node[inode].xhigh >= target_x - rlim &&
rr_node[inode].ylow <= target_y + rlim &&
rr_node[inode].yhigh >= target_y - rlim)) {
backward_path_cost = 0;
tot_cost =
backward_path_cost +
astar_fac *
get_directed_search_expected_cost(inode,
target_node);
node_to_heap(inode, tot_cost, NO_PREVIOUS,
NO_PREVIOUS, backward_path_cost,
OPEN);
}
}
tptr = tptr->next;
}
}
else
{ /* This case never executes for most logic blocks. */
printf("Warning: Multiple connections from net to the same sink. "
"This should not happen for LUT/Cluster based logic blocks. Aborting.\n");
exit(1);
}
return rlim;
}
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
| static boolean directed_search_route_net | ( | int | inet, |
| float | pres_fac, | ||
| float | astar_fac, | ||
| float | bend_cost, | ||
| t_mst_edge ** | mst | ||
| ) | [static] |
Uses a maze routing (Dijkstra's) algorithm to route a net. The net begins at the net output, and expands outward until it hits a target pin. The algorithm is then restarted with the entire first wire segment included as part of the source this time. For an n-pin net, the maze router is invoked n-1 times to complete all the connections. Inet is the index of the net to be routed. Bends are penalized by bend_cost (which is typically zero for detailed routing and nonzero only for global routing), since global routes with lots of bends are tougher to detailed route (using a detailed router like SEGA). If this routine finds that a net *cannot* be connected (due to a complete lack of potential paths, rather than congestion), it returns FALSE, as routing is impossible on this architecture. Otherwise it returns TRUE. WMF: This is the directed search (A-star) version of maze router.
Definition at line 253 of file route_directed_search.c.
{
int inode, remaining_connections_to_sink;
int itarget, target_pin, target_node;
struct s_heap *current;
struct s_trace *new_route_start_tptr;
float old_tcost, new_tcost, old_back_cost, new_back_cost;
int highfanout_rlim;
assert(mst);
/* Rip-up any old routing. */
/* WMF: For the 1st router iteration trace_head[inet] is NULL, as it is
* my_calloc'ed in alloc_route_structs() so the following does nothing.
* However, for subsequent iterations, trace_head[inet] contains the previous
* ieration's routing for this net. */
pathfinder_update_one_cost(trace_head[inet], -1, pres_fac);
free_traceback(inet); /* kills trace, and set the trace head and tail to NULL */
/* adding the SOURCE node to the heap with correct total cost */
target_pin = mst[inet][0].to_node;
target_node = net_rr_terminals[inet][target_pin];
directed_search_add_source_to_heap(inet, target_node, astar_fac);
mark_ends(inet);
remaining_connections_to_sink = 0;
for(itarget = 0; itarget < clb_net[inet].num_sinks; itarget++)
{
target_pin = mst[inet][itarget].to_node;
target_node = net_rr_terminals[inet][target_pin];
/* printf ("Target #%d, pin number %d, target_node: %d.\n",
* itarget, target_pin, target_node); */
/* WMF: since the heap has been emptied, need to restart the wavefront
* from the current partial routing, starting at the trace_head (SOURCE)
* Note: in the 1st iteration, there is no trace (no routing at all for this net)
* i.e. trace_head[inet] == NULL (found in free_traceback() in route_common.c,
* which is called before the routing of any net),
* so this routine does nothing, but the heap does have the SOURCE node due
* to directed_search_add_source_to_heap (inet) before the loop */
highfanout_rlim = directed_search_expand_trace_segment(trace_head[inet],
target_node, astar_fac, inet,
remaining_connections_to_sink);
current = get_heap_head();
if(current == NULL)
{ /* Infeasible routing. No possible path for net. */
reset_path_costs(); /* Clean up before leaving. */
return (FALSE);
}
inode = current->index;
while(inode != target_node)
{
old_tcost = rr_node_route_inf[inode].path_cost;
new_tcost = current->cost;
/* WMF: not needed if Vaughn initialized rr_node_route_inf[inode].backward_path_cost
* to HUGE_FLOAT along with rr_node_route_inf[inode].path_cost */
if(old_tcost > 0.99 * HUGE_FLOAT) /* First time touched. */
old_back_cost = HUGE_FLOAT;
else
old_back_cost =
rr_node_route_inf[inode].backward_path_cost;
new_back_cost = current->backward_path_cost;
/* I only re-expand a node if both the "known" backward cost is lower *
* in the new expansion (this is necessary to prevent loops from *
* forming in the routing and causing havoc) *and* the expected total *
* cost to the sink is lower than the old value. Different R_upstream *
* values could make a path with lower back_path_cost less desirable *
* than one with higher cost. Test whether or not I should disallow *
* re-expansion based on a higher total cost. */
/* updating the maze (Dijktra's min dist algorithm) if found "shorter" path */
if(old_tcost > new_tcost && old_back_cost > new_back_cost)
{
/* if (old_tcost > new_tcost) { */
rr_node_route_inf[inode].prev_node =
current->u.prev_node;
rr_node_route_inf[inode].prev_edge =
current->prev_edge;
rr_node_route_inf[inode].path_cost = new_tcost;
rr_node_route_inf[inode].backward_path_cost =
new_back_cost;
if(old_tcost > 0.99 * HUGE_FLOAT) /* First time touched. */
add_to_mod_list(&rr_node_route_inf[inode].
path_cost);
directed_search_expand_neighbours(current, inet,
bend_cost,
target_node,
highfanout_rlim,
astar_fac);
}
free_heap_data(current);
current = get_heap_head();
if(current == NULL)
{ /* Impossible routing. No path for net. */
printf("Failed to route net %s #%d pin %d num_sinks %d highfanout_rlim %d\n", clb_net[inet].name, inet, itarget, clb_net[inet].num_sinks, highfanout_rlim);
reset_path_costs();
return (FALSE);
}
inode = current->index;
}
rr_node_route_inf[inode].target_flag--; /* Connected to this SINK. */
remaining_connections_to_sink =
rr_node_route_inf[inode].target_flag;
/* keep info on the current routing of this net */
new_route_start_tptr = update_traceback(current, inet);
free_heap_data(current);
/* update the congestion costs of rr_nodes due to the routing to this sink
* so only those nodes used in the partial routing of this sink and not
* of the entire net (remember we're in a loop for this net over its sinks) */
pathfinder_update_one_cost(new_route_start_tptr, 1, pres_fac);
/* WMF: MUST empty heap and recalculate all total costs, because
* for the next sink, the target destination is changed, so the expected
* cost calculation is changed also, meaning all the nodes on the heap have
* "stale" total costs (costs based on last sink). */
empty_heap();
reset_path_costs();
}
return (TRUE);
}
Here is the call graph for this function: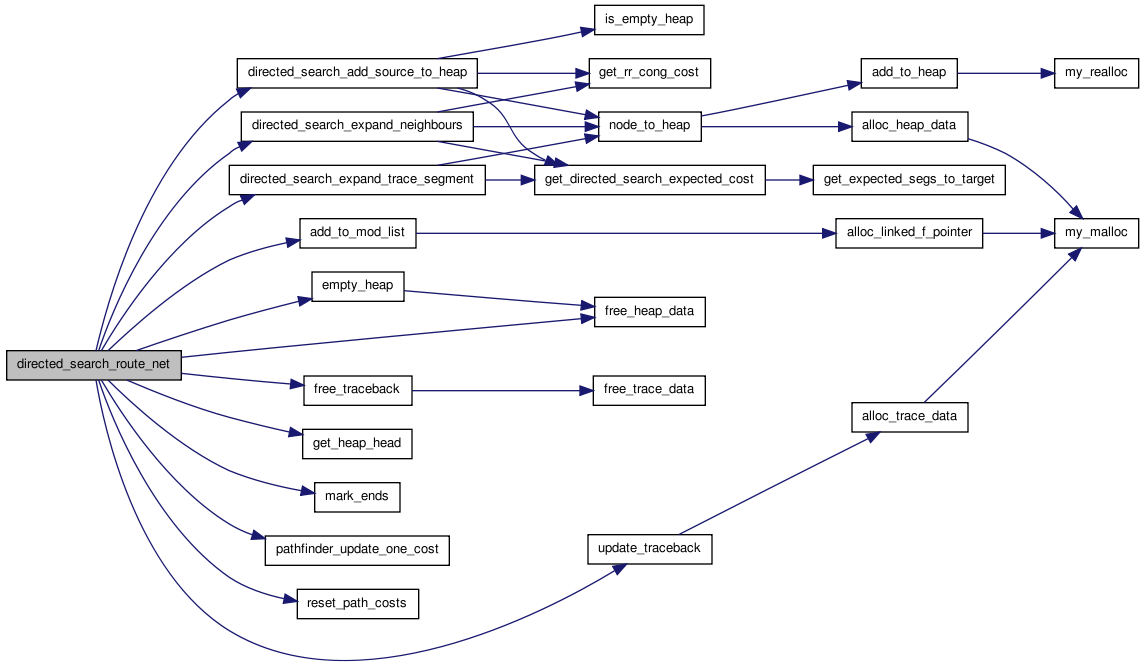 Here is the caller graph for this function:
Here is the caller graph for this function:
| static float get_directed_search_expected_cost | ( | int | inode, |
| int | target_node | ||
| ) | [static] |
Determines the expected cost (due to resouce cost i.e. distance) to reach the target node from inode. It doesn't include the cost of inode -- that's already in the "known" path_cost.
Definition at line 646 of file route_directed_search.c.
{
t_rr_type rr_type;
int cost_index, ortho_cost_index, num_segs_same_dir, num_segs_ortho_dir;
float cong_cost;
rr_type = rr_node[inode].type;
if(rr_type == CHANX || rr_type == CHANY)
{
num_segs_same_dir =
get_expected_segs_to_target(inode, target_node,
&num_segs_ortho_dir);
cost_index = rr_node[inode].cost_index;
ortho_cost_index = rr_indexed_data[cost_index].ortho_cost_index;
cong_cost =
num_segs_same_dir * rr_indexed_data[cost_index].base_cost +
num_segs_ortho_dir *
rr_indexed_data[ortho_cost_index].base_cost;
cong_cost +=
rr_indexed_data[IPIN_COST_INDEX].base_cost +
rr_indexed_data[SINK_COST_INDEX].base_cost;
return (cong_cost);
}
else if(rr_type == IPIN)
{ /* Change if you're allowing route-throughs */
return (rr_indexed_data[SINK_COST_INDEX].base_cost);
}
else
{ /* Change this if you want to investigate route-throughs */
return (0.);
}
}
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
| static int get_expected_segs_to_target | ( | int | inode, |
| int | target_node, | ||
| int * | num_segs_ortho_dir_ptr | ||
| ) | [static] |
Returns the number of segments the same type as inode that will be needed to reach target_node (not including inode) in each direction (the same direction (horizontal or vertical) as inode and the orthogonal direction).
Definition at line 697 of file route_directed_search.c.
{
t_rr_type rr_type;
int target_x, target_y, num_segs_same_dir, cost_index, ortho_cost_index;
int no_need_to_pass_by_clb;
float inv_length, ortho_inv_length, ylow, yhigh, xlow, xhigh;
target_x = rr_node[target_node].xlow;
target_y = rr_node[target_node].ylow;
cost_index = rr_node[inode].cost_index;
inv_length = rr_indexed_data[cost_index].inv_length;
ortho_cost_index = rr_indexed_data[cost_index].ortho_cost_index;
ortho_inv_length = rr_indexed_data[ortho_cost_index].inv_length;
rr_type = rr_node[inode].type;
if(rr_type == CHANX)
{
ylow = rr_node[inode].ylow;
xhigh = rr_node[inode].xhigh;
xlow = rr_node[inode].xlow;
/* Count vertical (orthogonal to inode) segs first. */
if(ylow > target_y)
{ /* Coming from a row above target? */
*num_segs_ortho_dir_ptr =
ROUND_UP((ylow - target_y + 1.) * ortho_inv_length);
no_need_to_pass_by_clb = 1;
}
else if(ylow < target_y - 1)
{ /* Below the CLB bottom? */
*num_segs_ortho_dir_ptr = ROUND_UP((target_y - ylow) *
ortho_inv_length);
no_need_to_pass_by_clb = 1;
}
else
{ /* In a row that passes by target CLB */
*num_segs_ortho_dir_ptr = 0;
no_need_to_pass_by_clb = 0;
}
/* Now count horizontal (same dir. as inode) segs. */
if(xlow > target_x + no_need_to_pass_by_clb)
{
num_segs_same_dir =
ROUND_UP((xlow - no_need_to_pass_by_clb -
target_x) * inv_length);
}
else if(xhigh < target_x - no_need_to_pass_by_clb)
{
num_segs_same_dir =
ROUND_UP((target_x - no_need_to_pass_by_clb -
xhigh) * inv_length);
}
else
{
num_segs_same_dir = 0;
}
}
else
{ /* inode is a CHANY */
ylow = rr_node[inode].ylow;
yhigh = rr_node[inode].yhigh;
xlow = rr_node[inode].xlow;
/* Count horizontal (orthogonal to inode) segs first. */
if(xlow > target_x)
{ /* Coming from a column right of target? */
*num_segs_ortho_dir_ptr =
ROUND_UP((xlow - target_x + 1.) * ortho_inv_length);
no_need_to_pass_by_clb = 1;
}
else if(xlow < target_x - 1)
{ /* Left of and not adjacent to the CLB? */
*num_segs_ortho_dir_ptr = ROUND_UP((target_x - xlow) *
ortho_inv_length);
no_need_to_pass_by_clb = 1;
}
else
{ /* In a column that passes by target CLB */
*num_segs_ortho_dir_ptr = 0;
no_need_to_pass_by_clb = 0;
}
/* Now count vertical (same dir. as inode) segs. */
if(ylow > target_y + no_need_to_pass_by_clb)
{
num_segs_same_dir =
ROUND_UP((ylow - no_need_to_pass_by_clb -
target_y) * inv_length);
}
else if(yhigh < target_y - no_need_to_pass_by_clb)
{
num_segs_same_dir =
ROUND_UP((target_y - no_need_to_pass_by_clb -
yhigh) * inv_length);
}
else
{
num_segs_same_dir = 0;
}
}
return (num_segs_same_dir);
}
Here is the caller graph for this function:
| boolean try_directed_search_route | ( | struct s_router_opts | router_opts, |
| t_ivec ** | clb_opins_used_locally, | ||
| int | width_fac, | ||
| t_mst_edge ** | mst | ||
| ) |
Iterated maze router ala Pathfinder Negotiated Congestion algorithm, (FPGA 95 p. 111). Returns TRUE if it can route this FPGA, FALSE if it can't.
Definition at line 57 of file route_directed_search.c.
{
float pres_fac;
boolean success, is_routable, rip_up_local_opins;
int itry, inet, i;
clock_t begin, end;
int bends;
int wirelength, total_wirelength, available_wirelength;
int segments;
float *sinks;
int *net_index;
sinks = my_malloc(sizeof(float) * num_nets);
net_index = my_malloc(sizeof(int) * num_nets);
for(i = 0; i < num_nets; i++) {
sinks[i] = clb_net[i].num_sinks;
net_index[i] = i;
}
heapsort(net_index, sinks, num_nets, 1);
/* char msg[100]; */
begin = clock();
/* mst not built as good as it should, ideally, just have it after placement once only
however, rr_node numbers changed when the channel width changes so forced to do it here */
if(mst)
{
for(inet = 0; inet < num_nets; inet++)
{
free(mst[inet]);
mst[inet] = get_mst_of_net(inet);
}
}
end = clock();
#ifdef CLOCKS_PER_SEC
printf("mst took %g seconds\n", (float)(end - begin) / CLOCKS_PER_SEC);
#else
printf("mst took %g seconds\n", (float)(end - begin) / CLK_PER_SEC);
#endif
/* Usually the first iteration uses a very small (or 0) pres_fac to find *
* the shortest path and get a congestion map. For fast compiles, I set *
* pres_fac high even for the first iteration. */
pres_fac = router_opts.first_iter_pres_fac;
for(itry = 1; itry <= router_opts.max_router_iterations; itry++)
{
begin = clock();
printf("routing iteration %d\n", itry);
for(i = 0; i < num_nets; i++)
{
inet = net_index[i];
if(clb_net[inet].is_global == FALSE && clb_net[inet].num_sinks != 0)
{ /* Skip global nets and empty nets (empty nets are already reserved using reserve_locally_used_opins). */
is_routable =
directed_search_route_net(inet, pres_fac,
router_opts.
astar_fac,
router_opts.
bend_cost, mst);
/* Impossible to route? (disconnected rr_graph) */
if(!is_routable)
{
printf("Routing failed.\n");
free(net_index);
free(sinks);
return (FALSE);
}
}
}
end = clock();
#ifdef CLOCKS_PER_SEC
printf("routing iteration took %g seconds\n", (float)(end - begin) / CLOCKS_PER_SEC);
#else
printf("routing iteration took %g seconds\n", (float)(end - begin) / CLK_PER_SEC);
#endif
fflush(stdout);
if(itry == 1) {
/* Early exit code for cases where it is obvious that a successful route will not be found
Heuristic: If total wirelength used in first routing iteration is X% of total available wirelength, exit
*/
total_wirelength = 0;
available_wirelength = 0;
for(i = 0; i < num_rr_nodes; i++) {
if(rr_node[i].type == CHANX || rr_node[i].type == CHANY)
{
available_wirelength += 1 + rr_node[i].xhigh - rr_node[i].xlow +
rr_node[i].yhigh - rr_node[i].ylow;
}
}
for(inet = 0; inet < num_nets; inet++)
{
if(clb_net[inet].is_global == FALSE && clb_net[inet].num_sinks != 0)
{ /* Globals don't count. */
get_num_bends_and_length(inet, &bends, &wirelength,
&segments);
total_wirelength += wirelength;
}
}
printf("wirelength after first iteration %d, total available wirelength %d, ratio %g\n", total_wirelength, available_wirelength, (float)(total_wirelength)/(float)(available_wirelength));
if((float)(total_wirelength)/(float)(available_wirelength) > FIRST_ITER_WIRELENTH_LIMIT) {
printf("Wirelength usage ratio exceeds limit of %g, fail routing\n", FIRST_ITER_WIRELENTH_LIMIT);
free(net_index);
free(sinks);
return FALSE;
}
}
/* Make sure any CLB OPINs used up by subblocks being hooked directly *
* to them are reserved for that purpose. */
if(itry == 1)
rip_up_local_opins = FALSE;
else
rip_up_local_opins = TRUE;
reserve_locally_used_opins(pres_fac, rip_up_local_opins,
clb_opins_used_locally);
success = feasible_routing();
if(success)
{
printf
("Successfully routed after %d routing iterations by Directed Search.\n",
itry);
free(net_index);
free(sinks);
return (TRUE);
}
#if 0
else
{
sprintf(msg,
"After iteration %d routing failed (A*) with a channel width factor of %d and Fc_int of %d, Fs_int of %d.",
itry, width_fac, Fc_int, Fs_int);
init_draw_coords(pins_per_clb);
update_screen(MAJOR, msg, ROUTING, FALSE);
}
#endif
if(itry == 1)
{
pres_fac = router_opts.initial_pres_fac;
pathfinder_update_cost(pres_fac, 0.); /* Acc_fac=0 for first iter. */
}
else
{
pres_fac *= router_opts.pres_fac_mult;
pathfinder_update_cost(pres_fac, router_opts.acc_fac);
}
}
printf("Routing failed.\n");
free(sinks);
free(net_index);
return (FALSE);
}
Here is the call graph for this function: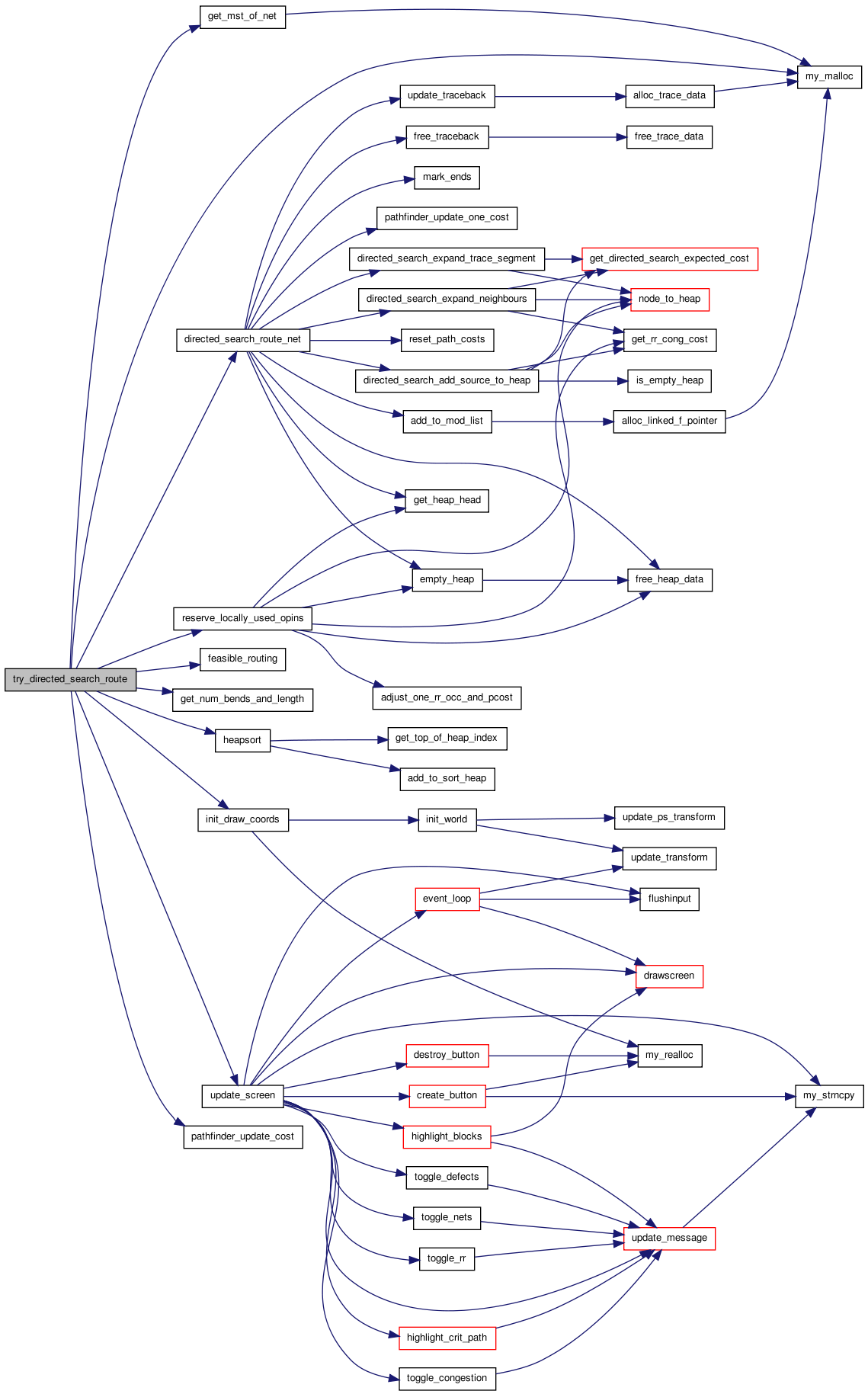 Here is the caller graph for this function:
Here is the caller graph for this function:
