 Research
ResearchMicro-scale actuators and motors provide a vast range of potential applications in broad areas. One promising area is biomedical applications, including active "smart" implants and surgical tools. In such devices, actuators need to fit in extremely limited physical spaces typically available in them, yet has to offer high operation reliability as well as high manufacturability for their production. Furthermore, wireless operation is essential for implant applications. We are investigating novel micro actuators that fulfill these requirements, aiming to drive technology innovations in biomedical areas and beyond.
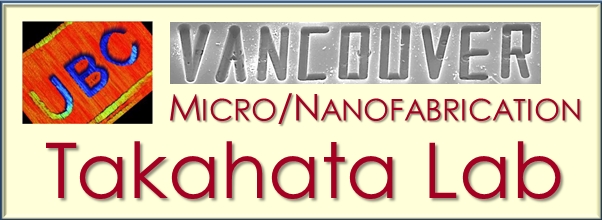
Thermoresponsive hydrogels such as poly(N-isopropylacrylamide), or PNIPAM, exhibit the phase transition temperature above which they shrink and deswell the fluid. Toward controlled wireless actuation of thermoresponsive materials such as PNIPAM, we have developed a frequency-selectable wireless resonant heater powered using external RF electromagnetic fields. The PNIPAM structures micropatterned on the planar heater were activated to eject the liquid stored in them, simply by tuning the field frequency to the resonant frequency of the heater, demonstrating wireless RF control of hydrogel actuation with high frequency selectivity. This novel technique was applied to the wireless control of microvalves for an implantable drug delivery chip (refer to Medical MEMS).
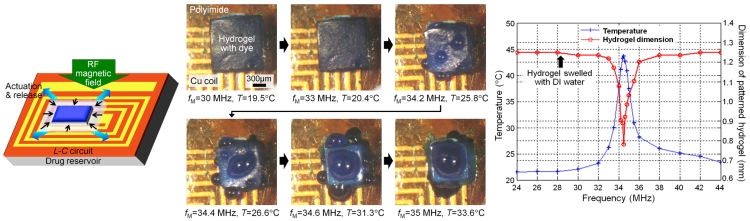
The ability to control multiple micro actuators selectively in a wireless manner will be a key to achieving multi-functionality in smart implants. For wireless drug delivery implants, for example, this ability is essential to perform synchronous operation of micro pumps and valves embedded within them. Moreover, it potentially enables selective delivery of different types of drugs at specific mixtures. In light of these, we have developed an RF technique to selectively control micro thermal actuators. Each of the actuators is designed to respond to RF excitation at a unique frequency, and FM waves are used to synchronously control them. This technique was applied to a microsyringe device that can eject controlled amounts of fluid/gel from its deformable reservoir through selective activation of multiple shape-memory alloy (SMA) micro actuators.
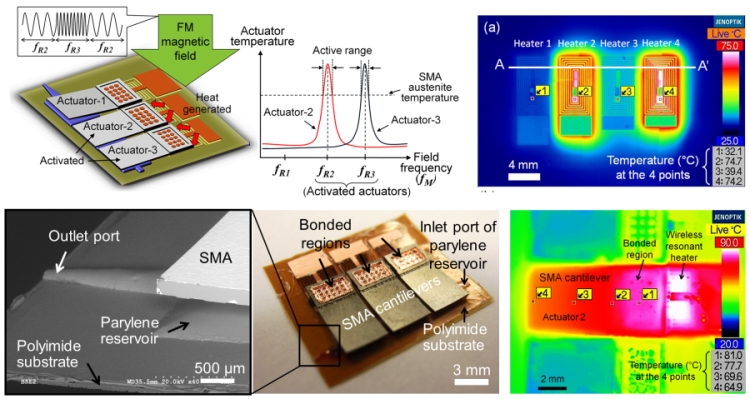
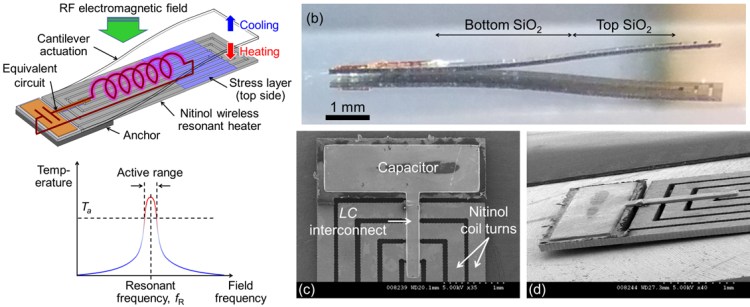
The RF-to-thermal energy conversion should be more efficient if the power transfer is made directly to a thermoresponsive material. Following this hypothesis, we designed and fabricated inductive spiral coils made of Nitinol, a biocompatible SMA, that could be used as RF receivers. In partiular, resonant circuits were formed by integrating planar capacitors on the coils, so that the circuit functioned as not only wireless resonant heaters but also actuator structures that were driven by heat produced directly in the Nitinol. Fabricated devices showed more power efficient and faster actuations. One type of them (shown below) was applied to an implantable drug delivery chip for wireless control of the microfluidic pump embedded within the chip (refer to Medical MEMS).
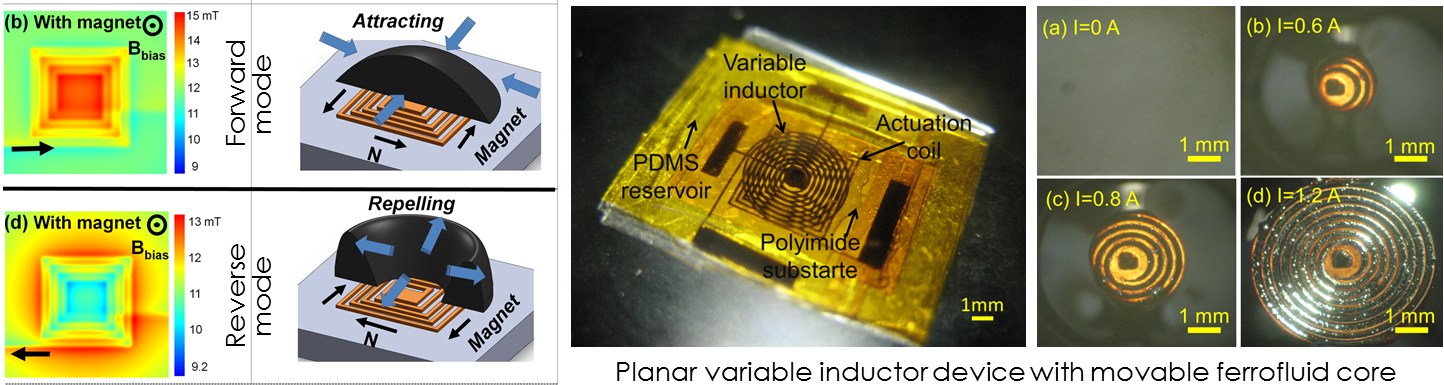
The magnetic fluid known as Ferrofluid belongs to a category of smart fluids that can be manipulated using magnetic fields. In the presence of a magnetic field gradient, this type of fluids flows toward the location with the highest magnetic flux density. We are studying the methods to achieve controlled manipulation of this fluid in the micro domain and exploring its potential in MEMS. This study has led to, for example, a method that uniquely enables bidirectional actuation of the fluid using micropatterned planar coil array and its application to an active mirror array. Another application that we have reported is a planar variable inductor, whose inductance is controlled via actuation of integrated ferrofluid that is used as a movable magnetic core for the inductor.
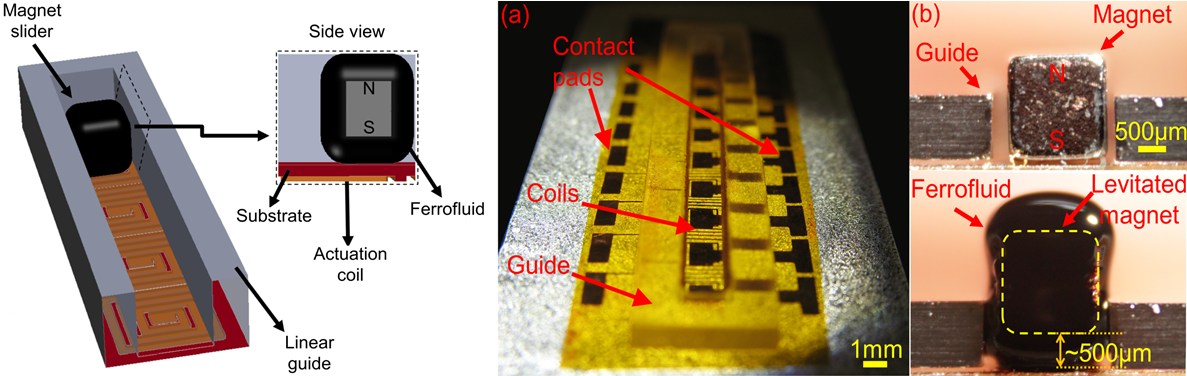
One challenge in realizing practical micro actuators/motors is the development of a reliable bearing. Although various antifriction methods (active fluidic bearing, passive fluidic/solid bearing, microball bearing, etc.) have been proposed toward this goal, they pose practical issues related to integration complexity, robustness and reliability, and high packaging cost. We have developed a novel micro bearing based on ferrofluid to address the problem. When a ferrofluid is applied to the rotor/slider magnet of rotary/linear micro actuator, the fluid accumulates around and levitates the magnet, allowing for its friction-less motions on the substrate. Here, the ferrofluid layer serves as a self-sustained liquid bearing as well as a lubricant that follows the magnet as it moves, eliminating the need for any precision alignment/assembly to maintain the bearing in the actuator construction. The device shown below is a micro linear actuator developed through this levitation approach.
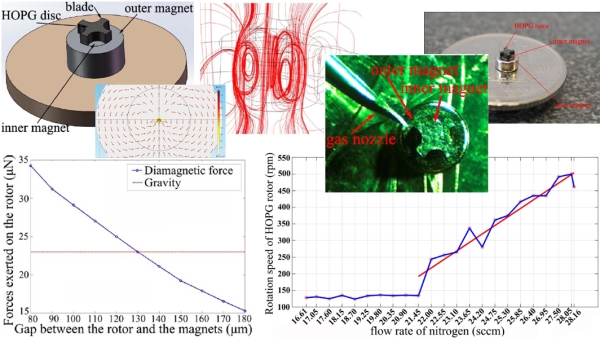
We are also investigating another type of micro levitation method based on diamagnetism for MEMS applications. This study has shown the first micromachined rotor of highly oriented pyrolytic graphite (HOPG), a strong diamagnetic material. The HOPG rotor is levitated above a permanent magnet structure to enable its friction-free rotation. The rotor was driven by gas flow to demonstrate stable continuous revolutions with the rates up to 500 rpm. The results suggest a promising application potential of the novel mechanism in friction-less micro sensors and actuators.
Collaborator: Prof. Yufeng Su, Zhengzhou University, China
Jump to other research theme:
The main page of Research

