|
|
||||||
|
||||||
| With Ph.D. students
Orcun Goksel (co-supervised
with R. Rohling) and Ehsan Dehghan.
Funded by NSERC CHRP. |
||||||
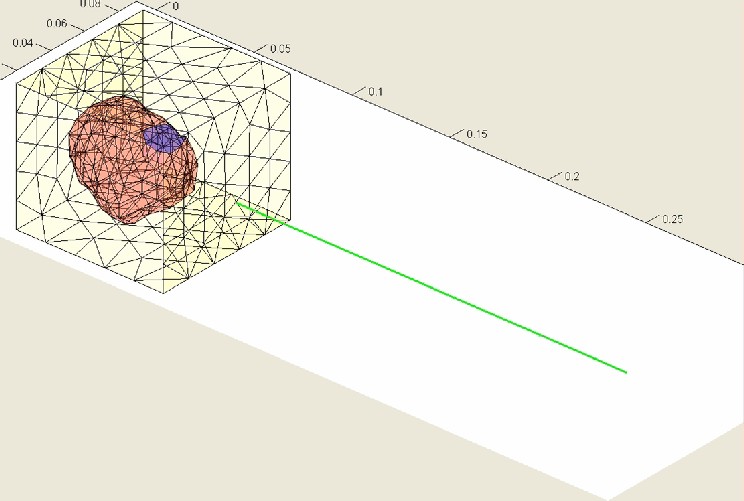
We are continuing the work
of Simon
DiMaio on the acquisition of needle insertion models, the fast simulation
of needle insertion suitable for  haptic simulation, and the
model-based planning of needle insertion paths into deformable tissue.
This work has many applications in medical procedures, ranging from anesthesia
to prostate
brachytherapy.
haptic simulation, and the
model-based planning of needle insertion paths into deformable tissue.
This work has many applications in medical procedures, ranging from anesthesia
to prostate
brachytherapy. We are developing
|
||||||
|
|
||||||
|
||||||
|
© 2001-2006 Tim Salcudean - last updated
November 2006
|
||||||