|
Molecular Mechatronics Group | ||||||
|
|
|
|
|
|
|
||
|
Research |
Current projects of this group include:
Researchers Involved:
In contrast to the complicated process of fabrication in silicon base devices, organic electronic devices can be made by various simple and cheap methods. Many of the organic semiconductors are soluble in organic solvents, so it is possible to make a thin film of them by spin coating, dip casting or stamping. Even it is possible to use the ink jet method to print a semiconductor device. Such a simple method can reduce the cost of production and consequently very cheap electronic products can be produced, particularly in the small quantities.
Since transistors are building blocks of integrated circuits, producing an organic transistor with reasonable and reliable electrical characteristics is a necessary step to developing the organic electronic devices. Most of the organic transistors that have been tested so far, need relatively high voltages (40V to 100V) for appropriate operations. Such a high voltages is a barrier for real applications of the organic devices especially for the battery supply circuits.
The focus of the current project is to eliminate the voltage problem in an organic transistor by modification of the structure and geometry of the transistor. The new structure has the advantage of the protection of the semiconductor against oxygen, which is an undesirable impurity. Simulation of the new structure has shown promising results: the voltage operation range is reduced to 3V with a performance close to the amorphous silicon transistors.
This project is directly involved to the fabrication and characterization of a modified organic transistor that can open a way to produce very cheap devices and circuits.
Researchers Involved:
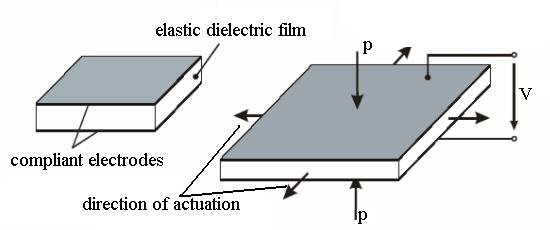
A variety of new materials have been tested for actuation in recent years. These allow for more efficient, lighter and more practical actuators compared with the conventional electromechanical motor actuators. Among these are dielectric elastomers and conductive polymers.
The bio-mimetic artificial flying insect is a collaborative project between different research groups at UBC. The goal is to build a robot with the size of a dragonfly that is capable of flying by flapping its wings. We intend to use dielectric elastomer actuators as artificial muscles for the dragonfly. Before that, the actuator materials need be studied, modeled and characterized and that is what we are investigating at this stage.
Artificial Muscles Based on Dielectric Elastomer Actuators
Researchers Involved:
Dielectric elastomers are very elastic materials capable of going through strains of a few hundred percents and then converting back to their original shape when the force causing the strain is removed. When sandwiched between two electrodes they can be used as Maxwell-stress actuators: when there is a voltage between the two electrodes, the attraction between them squeezes the elastomer. Since the elastomer is almost incompressible, this results in an expansion in the other directions. By switching the voltage on and off, cycles of expansion/contraction can be created at frequencies of up to 100Hz. This makes them appropriate for use as artificial muscles or expandable diaphragms.
Electrolocation in the Black Ghost Knifefish
Researchers Involved:
Electrical impedance tomography, as well as the related geophysical technique known as electrical resistance tomography, attempts to reconstruct the conductivity of a region based on electrical measurements at its boundary. We are currently learning some of the nuances of the problem and published inversion methods in the hope of better understanding some of the approximations that are used. We are also working on fast boundary element methods for simulating the forward problem of determining what measurements result from given spatial conductivities.
Researchers Involved:
Supercapacitors are electrochemical capacitors that take advantage of the double-layer charge that forms across electrode-solution interfaces. By maximizing the internal surface area available, while minimizing the weight, it is possible to achieve very high specific capacitances. Energy storage density can be further increased by coating porous electrodes with redox active materials that store charges within their volumes. Polypyrrole electrodeposited films exhibit capacitances in excess of 100 F/g; however their response rate is limited by the slow ion transport through the film. To solve this problem, polypyrrole is being electrodeposited on carbon fibers and carbon nanotubes to fabricate porous composites. The immediate goal is to achieve capacitances approaching 100 F/g with sub second response times.
Investigation of Loading on Bone Remodeling
Researchers Involved:
The failure rate of primary hip implants after 17 years is 13-20% (Swedish National Hip Arthoplasty Registry, 2000) and successive surgeries lead to increasing failure rates of 35% after 5 years (Bucholz, 1988). Impaction Allografting is a procedure used to secure a metallic hip implant in revision hip surgery. The metallic hip implant is secured within a bed of impacted, morselized bone graft and cement. Over time, the bone graft is resorbed by the patient’s host bone and replaced by living bone. This process is sensitive to load (Wang, 2000); however, the optimal loading conditions that stimulate bone graft remodeling are unknown. Our work is focused on the design and implementation of an in vivo, micro-motor actuator that will apply variable loads to bone graft in a rat tibia. A lithium-ion battery and a motor driver chip will be implanted to power the motor. The motor driver and ultimately the loading parameters such as magnitude, frequency, duty cycle and duration will be varied by a remote radio frequency (RF) transmitter and an in vivo RF chip. The animals will be sacrificed at 6 weeks; histological and biomechanical analyses will be conducted to determine the correlation between bone remodeling and various loading conditions.
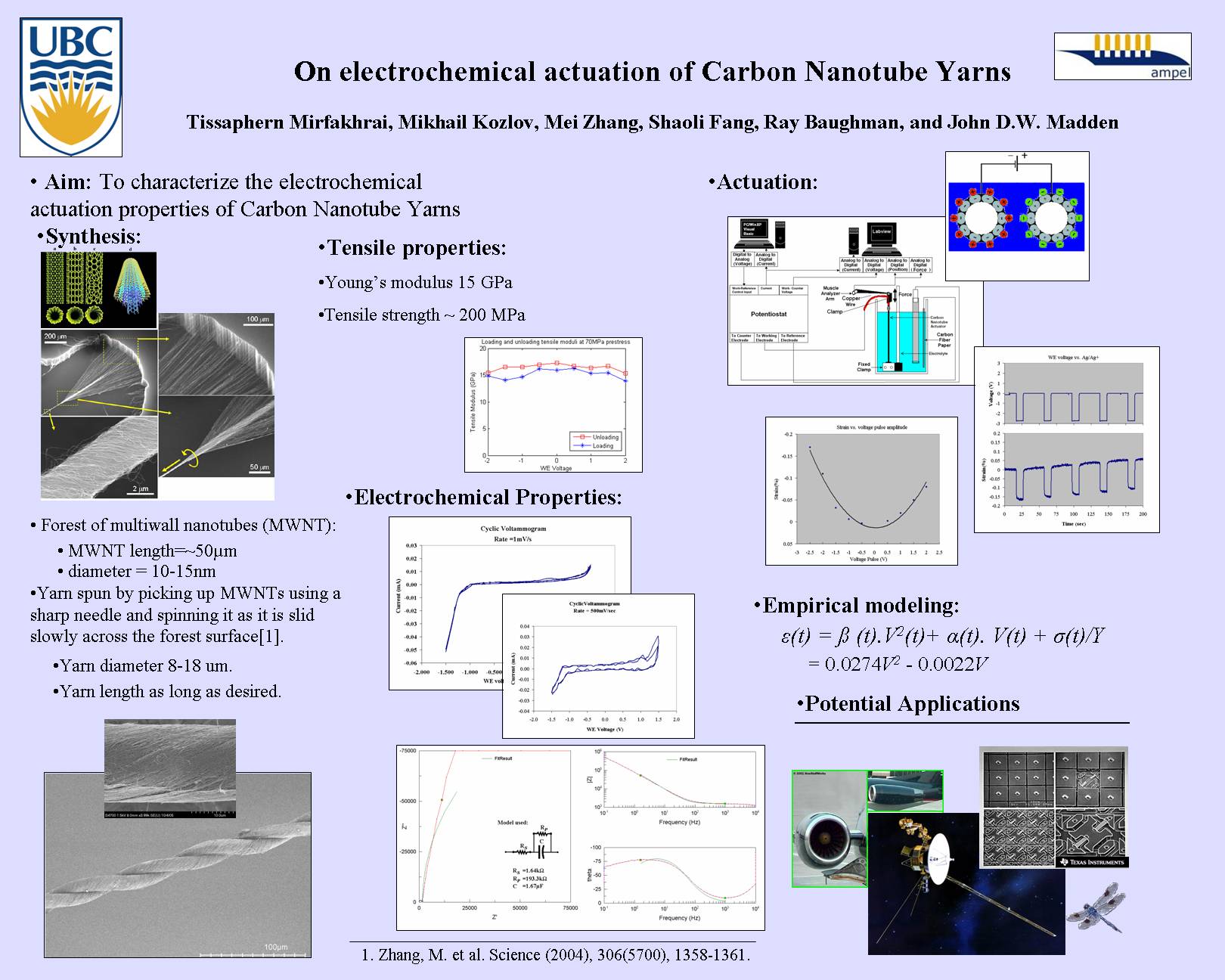
Carbon Nanotube Yarn Actuators
Researchers Involved:
Carbon nanotubes have attracted extensive attention in the past few years because of their appealing mechanical and electronic properties. They not only have some of the highest tensile strengths among all materials and very high Young's moduli, but also can be metallic or semiconducting depending on their geometry. Numerous applications have been suggested for them in electronics, mechanical engineering and material science, many of which require macroscopic combinations of these nanoscopic tubes. Many attempts have been made in making macroscopic structures of nanotubes that preserve the desirable mechanical and electronic properties of the individual tubes. The focus of my research is the study of actuation in materials made from Carbon nanotubes; specifically, yarns spun from multiwall carbon nanotubes. These yarns are spun from hundreds of thousands of well-aligned nanotubes by our collaborators in the Nanotech institute of UTD and exhibit some of the best mechanical properties among macroscopic structures made of nanotubes. The yarns show great potential for applications as they are strong and easy to use. The goal is to characterize their electrical, mechanical and electrochemical properties. This will help lay the groundwork for their application as actuators among other things.
|
||||||
| Home | Members | Research | Publications | Collaborations | Links | |||||||