src/map/mapper/mapperMatch.c File Reference
#include "mapperInt.h"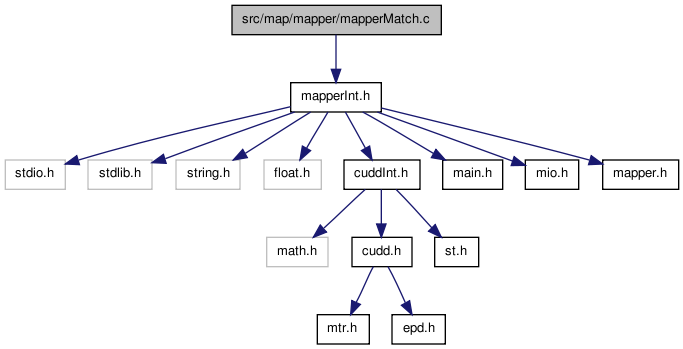
Go to the source code of this file.
Functions | |
| static int | Map_MatchNodePhase (Map_Man_t *p, Map_Node_t *pNode, int fPhase) |
| static int | Map_MatchNodeCut (Map_Man_t *p, Map_Node_t *pNode, Map_Cut_t *pCut, int fPhase, float fWorstLimit) |
| static void | Map_MappingSetPiArrivalTimes (Map_Man_t *p) |
| static void | Map_NodeTryDroppingOnePhase (Map_Man_t *p, Map_Node_t *pNode) |
| static void | Map_NodeTransferArrivalTimes (Map_Man_t *p, Map_Node_t *pNode) |
| int | Map_MappingMatches (Map_Man_t *p) |
| void | Map_MatchClean (Map_Match_t *pMatch) |
| int | Map_MatchCompare (Map_Man_t *pMan, Map_Match_t *pM1, Map_Match_t *pM2, int fDoingArea) |
Function Documentation
| int Map_MappingMatches | ( | Map_Man_t * | p | ) |
FUNCTION DEFINITIONS ///Function*************************************************************
Synopsis [Computes the best matches of the nodes.]
Description [Uses parameter p->fMappingMode to decide how to assign the matches for both polarities of the node. While the matches are being assigned, one of them may turn out to be better than the other (in terms of delay, for example). In this case, the worse match can be permanently dropped, and the corresponding pointer set to NULL.]
SideEffects []
SeeAlso []
Definition at line 62 of file mapperMatch.c.
00063 { 00064 ProgressBar * pProgress; 00065 Map_Node_t * pNode; 00066 int i; 00067 00068 assert( p->fMappingMode >= 0 && p->fMappingMode <= 4 ); 00069 00070 // use the externally given PI arrival times 00071 if ( p->fMappingMode == 0 ) 00072 Map_MappingSetPiArrivalTimes( p ); 00073 00074 // estimate the fanouts 00075 if ( p->fMappingMode == 0 ) 00076 Map_MappingEstimateRefsInit( p ); 00077 else if ( p->fMappingMode == 1 ) 00078 Map_MappingEstimateRefs( p ); 00079 00080 // the PI cuts are matched in the cut computation package 00081 // in the loop below we match the internal nodes 00082 pProgress = Extra_ProgressBarStart( stdout, p->vAnds->nSize ); 00083 for ( i = 0; i < p->vAnds->nSize; i++ ) 00084 { 00085 // skip primary inputs and secondary nodes if mapping with choices 00086 pNode = p->vAnds->pArray[i]; 00087 if ( !Map_NodeIsAnd( pNode ) || pNode->pRepr ) 00088 continue; 00089 00090 // make sure that at least one non-trival cut is present 00091 if ( pNode->pCuts->pNext == NULL ) 00092 { 00093 printf( "\nError: A node in the mapping graph does not have feasible cuts.\n" ); 00094 return 0; 00095 } 00096 00097 // match negative phase 00098 if ( !Map_MatchNodePhase( p, pNode, 0 ) ) 00099 return 0; 00100 // match positive phase 00101 if ( !Map_MatchNodePhase( p, pNode, 1 ) ) 00102 return 0; 00103 00104 // make sure that at least one phase is mapped 00105 if ( pNode->pCutBest[0] == NULL && pNode->pCutBest[1] == NULL ) 00106 { 00107 printf( "\nError: Could not match both phases of AIG node %d.\n", pNode->Num ); 00108 printf( "Please make sure that the supergate library has equivalents of AND2 or NAND2.\n" ); 00109 printf( "If such supergates exist in the library, report a bug.\n" ); 00110 return 0; 00111 } 00112 00113 // if both phases are assigned, check if one of them can be dropped 00114 Map_NodeTryDroppingOnePhase( p, pNode ); 00115 // set the arrival times of the node using the best cuts 00116 Map_NodeTransferArrivalTimes( p, pNode ); 00117 00118 // update the progress bar 00119 Extra_ProgressBarUpdate( pProgress, i, "Matches ..." ); 00120 } 00121 Extra_ProgressBarStop( pProgress ); 00122 return 1; 00123 }
| void Map_MappingSetPiArrivalTimes | ( | Map_Man_t * | p | ) | [static] |
Function*************************************************************
Synopsis [Sets the PI arrival times.]
Description []
SideEffects []
SeeAlso []
Definition at line 429 of file mapperMatch.c.
00430 { 00431 Map_Node_t * pNode; 00432 int i; 00433 for ( i = 0; i < p->nInputs; i++ ) 00434 { 00435 pNode = p->pInputs[i]; 00436 // set the arrival time of the positive phase 00437 pNode->tArrival[1] = p->pInputArrivals[i]; 00438 // set the arrival time of the negative phase 00439 pNode->tArrival[0].Rise = pNode->tArrival[1].Fall + p->pSuperLib->tDelayInv.Rise; 00440 pNode->tArrival[0].Fall = pNode->tArrival[1].Rise + p->pSuperLib->tDelayInv.Fall; 00441 pNode->tArrival[0].Worst = MAP_MAX(pNode->tArrival[0].Rise, pNode->tArrival[0].Fall); 00442 } 00443 }
| void Map_MatchClean | ( | Map_Match_t * | pMatch | ) |
Function*************************************************************
Synopsis [Cleans the match.]
Description []
SideEffects []
SeeAlso []
Definition at line 344 of file mapperMatch.c.
00345 { 00346 memset( pMatch, 0, sizeof(Map_Match_t) ); 00347 pMatch->AreaFlow = MAP_FLOAT_LARGE; // unassigned 00348 pMatch->tArrive.Rise = MAP_FLOAT_LARGE; // unassigned 00349 pMatch->tArrive.Fall = MAP_FLOAT_LARGE; // unassigned 00350 pMatch->tArrive.Worst = MAP_FLOAT_LARGE; // unassigned 00351 }
| int Map_MatchCompare | ( | Map_Man_t * | pMan, | |
| Map_Match_t * | pM1, | |||
| Map_Match_t * | pM2, | |||
| int | fDoingArea | |||
| ) |
Function*************************************************************
Synopsis [Compares two matches.]
Description [Returns 1 if the second match is better. Otherwise returns 0.]
SideEffects []
SeeAlso []
Definition at line 364 of file mapperMatch.c.
00365 { 00366 if ( !fDoingArea ) 00367 { 00368 // compare the arrival times 00369 if ( pM1->tArrive.Worst < pM2->tArrive.Worst - pMan->fEpsilon ) 00370 return 0; 00371 if ( pM1->tArrive.Worst > pM2->tArrive.Worst + pMan->fEpsilon ) 00372 return 1; 00373 // compare the areas or area flows 00374 if ( pM1->AreaFlow < pM2->AreaFlow - pMan->fEpsilon ) 00375 return 0; 00376 if ( pM1->AreaFlow > pM2->AreaFlow + pMan->fEpsilon ) 00377 return 1; 00378 // compare the fanout limits 00379 if ( pM1->pSuperBest->nFanLimit > pM2->pSuperBest->nFanLimit ) 00380 return 0; 00381 if ( pM1->pSuperBest->nFanLimit < pM2->pSuperBest->nFanLimit ) 00382 return 1; 00383 // compare the number of leaves 00384 if ( pM1->pSuperBest->nFanins < pM2->pSuperBest->nFanins ) 00385 return 0; 00386 if ( pM1->pSuperBest->nFanins > pM2->pSuperBest->nFanins ) 00387 return 1; 00388 // otherwise prefer the old cut 00389 return 0; 00390 } 00391 else 00392 { 00393 // compare the areas or area flows 00394 if ( pM1->AreaFlow < pM2->AreaFlow - pMan->fEpsilon ) 00395 return 0; 00396 if ( pM1->AreaFlow > pM2->AreaFlow + pMan->fEpsilon ) 00397 return 1; 00398 // compare the arrival times 00399 if ( pM1->tArrive.Worst < pM2->tArrive.Worst - pMan->fEpsilon ) 00400 return 0; 00401 if ( pM1->tArrive.Worst > pM2->tArrive.Worst + pMan->fEpsilon ) 00402 return 1; 00403 // compare the fanout limits 00404 if ( pM1->pSuperBest->nFanLimit > pM2->pSuperBest->nFanLimit ) 00405 return 0; 00406 if ( pM1->pSuperBest->nFanLimit < pM2->pSuperBest->nFanLimit ) 00407 return 1; 00408 // compare the number of leaves 00409 if ( pM1->pSuperBest->nFanins < pM2->pSuperBest->nFanins ) 00410 return 0; 00411 if ( pM1->pSuperBest->nFanins > pM2->pSuperBest->nFanins ) 00412 return 1; 00413 // otherwise prefer the old cut 00414 return 0; 00415 } 00416 }
| int Map_MatchNodeCut | ( | Map_Man_t * | p, | |
| Map_Node_t * | pNode, | |||
| Map_Cut_t * | pCut, | |||
| int | fPhase, | |||
| float | fWorstLimit | |||
| ) | [static] |
Function*************************************************************
Synopsis [Find the best matching of the cut.]
Description [The parameters: the node (pNode), the cut (pCut), the phase to be matched (fPhase), and the upper bound on the arrival times of the cut (fWorstLimit). This procedure goes through the matching supergates up to the phase assignment, and selects the best supergate, which will be used to map the cut. As a result of calling this procedure the matching information is written into pMatch.]
SideEffects []
SeeAlso []
Definition at line 252 of file mapperMatch.c.
00253 { 00254 Map_Match_t MatchBest, * pMatch = pCut->M + fPhase; 00255 Map_Super_t * pSuper; 00256 int i, Counter; 00257 00258 // save the current match of the cut 00259 MatchBest = *pMatch; 00260 // go through the supergates 00261 for ( pSuper = pMatch->pSupers, Counter = 0; pSuper; pSuper = pSuper->pNext, Counter++ ) 00262 { 00263 p->nMatches++; 00264 // this is an attempt to reduce the runtime of matching and area 00265 // at the cost of rare and very minor increase in delay 00266 // (the supergates are sorted by increasing area) 00267 if ( Counter == 30 ) 00268 break; 00269 00270 // go through different phases of the given match and supergate 00271 pMatch->pSuperBest = pSuper; 00272 for ( i = 0; i < (int)pSuper->nPhases; i++ ) 00273 { 00274 p->nPhases++; 00275 // find the overall phase of this match 00276 pMatch->uPhaseBest = pMatch->uPhase ^ pSuper->uPhases[i]; 00277 if ( p->fMappingMode == 0 ) 00278 { 00279 // get the arrival time 00280 Map_TimeCutComputeArrival( pNode, pCut, fPhase, fWorstLimit ); 00281 // skip the cut if the arrival times exceed the required times 00282 if ( pMatch->tArrive.Worst > fWorstLimit + p->fEpsilon ) 00283 continue; 00284 // get the area (area flow) 00285 pMatch->AreaFlow = Map_CutGetAreaFlow( pCut, fPhase ); 00286 } 00287 else 00288 { 00289 // get the area (area flow) 00290 if ( p->fMappingMode == 2 || p->fMappingMode == 3 ) 00291 pMatch->AreaFlow = Map_CutGetAreaDerefed( pCut, fPhase ); 00292 else if ( p->fMappingMode == 4 ) 00293 pMatch->AreaFlow = Map_SwitchCutGetDerefed( pNode, pCut, fPhase ); 00294 else 00295 pMatch->AreaFlow = Map_CutGetAreaFlow( pCut, fPhase ); 00296 // skip if the cut is too large 00297 if ( pMatch->AreaFlow > MatchBest.AreaFlow + p->fEpsilon ) 00298 continue; 00299 // get the arrival time 00300 Map_TimeCutComputeArrival( pNode, pCut, fPhase, fWorstLimit ); 00301 // skip the cut if the arrival times exceed the required times 00302 if ( pMatch->tArrive.Worst > fWorstLimit + p->fEpsilon ) 00303 continue; 00304 } 00305 00306 // if the cut is non-trivial, compare it 00307 if ( Map_MatchCompare( p, &MatchBest, pMatch, p->fMappingMode ) ) 00308 { 00309 MatchBest = *pMatch; 00310 // if we are mapping for delay, the worst-case limit should be reduced 00311 if ( p->fMappingMode == 0 ) 00312 fWorstLimit = MatchBest.tArrive.Worst; 00313 } 00314 } 00315 } 00316 // set the best match 00317 *pMatch = MatchBest; 00318 00319 // recompute the arrival time and area (area flow) of this cut 00320 if ( pMatch->pSuperBest ) 00321 { 00322 Map_TimeCutComputeArrival( pNode, pCut, fPhase, MAP_FLOAT_LARGE ); 00323 if ( p->fMappingMode == 2 || p->fMappingMode == 3 ) 00324 pMatch->AreaFlow = Map_CutGetAreaDerefed( pCut, fPhase ); 00325 else if ( p->fMappingMode == 4 ) 00326 pMatch->AreaFlow = Map_SwitchCutGetDerefed( pNode, pCut, fPhase ); 00327 else 00328 pMatch->AreaFlow = Map_CutGetAreaFlow( pCut, fPhase ); 00329 } 00330 return 1; 00331 }
| int Map_MatchNodePhase | ( | Map_Man_t * | p, | |
| Map_Node_t * | pNode, | |||
| int | fPhase | |||
| ) | [static] |
CFile****************************************************************
FileName [mapperMatch.c]
PackageName [MVSIS 1.3: Multi-valued logic synthesis system.]
Synopsis [Generic technology mapping engine.]
Author [MVSIS Group]
Affiliation [UC Berkeley]
Date [Ver. 2.0. Started - June 1, 2004.]
Revision [
- Id
- mapperMatch.c,v 1.7 2004/09/30 21:18:10 satrajit Exp
] DECLARATIONS ///
Function*************************************************************
Synopsis [Find the matching of one polarity of the node.]
Description []
SideEffects []
SeeAlso []
Definition at line 136 of file mapperMatch.c.
00137 { 00138 Map_Match_t MatchBest, * pMatch; 00139 Map_Cut_t * pCut, * pCutBest; 00140 float Area1, Area2, fWorstLimit; 00141 00142 // skip the cuts that have been unassigned during area recovery 00143 pCutBest = pNode->pCutBest[fPhase]; 00144 if ( p->fMappingMode != 0 && pCutBest == NULL ) 00145 return 1; 00146 00147 // recompute the arrival times of the current best match 00148 // because the arrival times of the fanins may have changed 00149 // as a result of remapping fanins in the topological order 00150 if ( p->fMappingMode != 0 ) 00151 { 00152 Map_TimeCutComputeArrival( pNode, pCutBest, fPhase, MAP_FLOAT_LARGE ); 00153 // make sure that the required times are met 00154 assert( pCutBest->M[fPhase].tArrive.Rise < pNode->tRequired[fPhase].Rise + p->fEpsilon ); 00155 assert( pCutBest->M[fPhase].tArrive.Fall < pNode->tRequired[fPhase].Fall + p->fEpsilon ); 00156 } 00157 00158 // recompute the exact area of the current best match 00159 // because the exact area of the fanins may have changed 00160 // as a result of remapping fanins in the topological order 00161 if ( p->fMappingMode == 2 || p->fMappingMode == 3 ) 00162 { 00163 pMatch = pCutBest->M + fPhase; 00164 if ( pNode->nRefAct[fPhase] > 0 || 00165 (pNode->pCutBest[!fPhase] == NULL && pNode->nRefAct[!fPhase] > 0) ) 00166 pMatch->AreaFlow = Area1 = Map_CutDeref( pCutBest, fPhase ); 00167 else 00168 pMatch->AreaFlow = Area1 = Map_CutGetAreaDerefed( pCutBest, fPhase ); 00169 } 00170 else if ( p->fMappingMode == 4 ) 00171 { 00172 pMatch = pCutBest->M + fPhase; 00173 if ( pNode->nRefAct[fPhase] > 0 || 00174 (pNode->pCutBest[!fPhase] == NULL && pNode->nRefAct[!fPhase] > 0) ) 00175 pMatch->AreaFlow = Area1 = Map_SwitchCutDeref( pNode, pCutBest, fPhase ); 00176 else 00177 pMatch->AreaFlow = Area1 = Map_SwitchCutGetDerefed( pNode, pCutBest, fPhase ); 00178 } 00179 00180 // save the old mapping 00181 if ( pCutBest ) 00182 MatchBest = pCutBest->M[fPhase]; 00183 else 00184 Map_MatchClean( &MatchBest ); 00185 00186 // select the new best cut 00187 fWorstLimit = pNode->tRequired[fPhase].Worst; 00188 for ( pCut = pNode->pCuts->pNext; pCut; pCut = pCut->pNext ) 00189 { 00190 pMatch = pCut->M + fPhase; 00191 if ( pMatch->pSupers == NULL ) 00192 continue; 00193 00194 // find the matches for the cut 00195 Map_MatchNodeCut( p, pNode, pCut, fPhase, fWorstLimit ); 00196 if ( pMatch->pSuperBest == NULL || pMatch->tArrive.Worst > fWorstLimit + p->fEpsilon ) 00197 continue; 00198 00199 // if the cut can be matched compare the matchings 00200 if ( Map_MatchCompare( p, &MatchBest, pMatch, p->fMappingMode ) ) 00201 { 00202 pCutBest = pCut; 00203 MatchBest = *pMatch; 00204 // if we are mapping for delay, the worst-case limit should be tightened 00205 if ( p->fMappingMode == 0 ) 00206 fWorstLimit = MatchBest.tArrive.Worst; 00207 } 00208 } 00209 00210 if ( pCutBest == NULL ) 00211 return 1; 00212 00213 // set the new mapping 00214 pNode->pCutBest[fPhase] = pCutBest; 00215 pCutBest->M[fPhase] = MatchBest; 00216 00217 // reference the new cut if it used 00218 if ( p->fMappingMode >= 2 && 00219 (pNode->nRefAct[fPhase] > 0 || 00220 (pNode->pCutBest[!fPhase] == NULL && pNode->nRefAct[!fPhase] > 0)) ) 00221 { 00222 if ( p->fMappingMode == 2 || p->fMappingMode == 3 ) 00223 Area2 = Map_CutRef( pNode->pCutBest[fPhase], fPhase ); 00224 else if ( p->fMappingMode == 4 ) 00225 Area2 = Map_SwitchCutRef( pNode, pNode->pCutBest[fPhase], fPhase ); 00226 else 00227 assert( 0 ); 00228 assert( Area2 < Area1 + p->fEpsilon ); 00229 } 00230 00231 // make sure that the requited times are met 00232 assert( MatchBest.tArrive.Rise < pNode->tRequired[fPhase].Rise + p->fEpsilon ); 00233 assert( MatchBest.tArrive.Fall < pNode->tRequired[fPhase].Fall + p->fEpsilon ); 00234 return 1; 00235 }
| void Map_NodeTransferArrivalTimes | ( | Map_Man_t * | p, | |
| Map_Node_t * | pNode | |||
| ) | [static] |
Function*************************************************************
Synopsis [Transfers the arrival times from the best cuts to the node.]
Description []
SideEffects []
SeeAlso []
Definition at line 559 of file mapperMatch.c.
00560 { 00561 // if both phases are available, set their arrival times 00562 if ( pNode->pCutBest[0] && pNode->pCutBest[1] ) 00563 { 00564 pNode->tArrival[0] = pNode->pCutBest[0]->M[0].tArrive; 00565 pNode->tArrival[1] = pNode->pCutBest[1]->M[1].tArrive; 00566 } 00567 // if only one phase is available, compute the arrival time of other phase 00568 else if ( pNode->pCutBest[0] ) 00569 { 00570 pNode->tArrival[0] = pNode->pCutBest[0]->M[0].tArrive; 00571 pNode->tArrival[1].Rise = pNode->tArrival[0].Fall + p->pSuperLib->tDelayInv.Rise; 00572 pNode->tArrival[1].Fall = pNode->tArrival[0].Rise + p->pSuperLib->tDelayInv.Fall; 00573 pNode->tArrival[1].Worst = MAP_MAX(pNode->tArrival[1].Rise, pNode->tArrival[1].Fall); 00574 } 00575 else if ( pNode->pCutBest[1] ) 00576 { 00577 pNode->tArrival[1] = pNode->pCutBest[1]->M[1].tArrive; 00578 pNode->tArrival[0].Rise = pNode->tArrival[1].Fall + p->pSuperLib->tDelayInv.Rise; 00579 pNode->tArrival[0].Fall = pNode->tArrival[1].Rise + p->pSuperLib->tDelayInv.Fall; 00580 pNode->tArrival[0].Worst = MAP_MAX(pNode->tArrival[0].Rise, pNode->tArrival[0].Fall); 00581 } 00582 else 00583 { 00584 assert( 0 ); 00585 } 00586 00587 assert( pNode->tArrival[0].Rise < pNode->tRequired[0].Rise + p->fEpsilon ); 00588 assert( pNode->tArrival[0].Fall < pNode->tRequired[0].Fall + p->fEpsilon ); 00589 00590 assert( pNode->tArrival[1].Rise < pNode->tRequired[1].Rise + p->fEpsilon ); 00591 assert( pNode->tArrival[1].Fall < pNode->tRequired[1].Fall + p->fEpsilon ); 00592 }
| void Map_NodeTryDroppingOnePhase | ( | Map_Man_t * | p, | |
| Map_Node_t * | pNode | |||
| ) | [static] |
Function*************************************************************
Synopsis [Attempts dropping one phase of the node.]
Description []
SideEffects []
SeeAlso []
Definition at line 457 of file mapperMatch.c.
00458 { 00459 Map_Match_t * pMatchBest0, * pMatchBest1; 00460 float tWorst0Using1, tWorst1Using0; 00461 int fUsePhase1, fUsePhase0; 00462 00463 // nothing to do if one of the phases is already dropped 00464 if ( pNode->pCutBest[0] == NULL || pNode->pCutBest[1] == NULL ) 00465 return; 00466 00467 // do not drop while recovering area flow 00468 if ( p->fMappingMode == 1 )//|| p->fMappingMode == 2 ) 00469 return; 00470 00471 // get the pointers to the matches of the best cuts 00472 pMatchBest0 = pNode->pCutBest[0]->M + 0; 00473 pMatchBest1 = pNode->pCutBest[1]->M + 1; 00474 00475 // get the worst arrival times of each phase 00476 // implemented using the other phase with inverter added 00477 tWorst0Using1 = Map_TimeMatchWithInverter( p, pMatchBest1 ); 00478 tWorst1Using0 = Map_TimeMatchWithInverter( p, pMatchBest0 ); 00479 00480 // consider the case of mapping for delay 00481 if ( p->fMappingMode == 0 ) 00482 { 00483 // if the arrival time of a phase is larger than the arrival time 00484 // of the opposite phase plus the inverter, drop this phase 00485 if ( pMatchBest0->tArrive.Worst > tWorst0Using1 + p->fEpsilon ) 00486 pNode->pCutBest[0] = NULL; 00487 else if ( pMatchBest1->tArrive.Worst > tWorst1Using0 + p->fEpsilon ) 00488 pNode->pCutBest[1] = NULL; 00489 return; 00490 } 00491 00492 // do not perform replacement if one of the phases is unused 00493 if ( pNode->nRefAct[0] == 0 || pNode->nRefAct[1] == 0 ) 00494 return; 00495 00496 // check if replacement of each phase is possible using required times 00497 fUsePhase0 = fUsePhase1 = 0; 00498 if ( p->fMappingMode == 2 ) 00499 { 00500 fUsePhase0 = (pNode->tRequired[1].Worst > tWorst1Using0 + 3*p->pSuperLib->tDelayInv.Worst + p->fEpsilon); 00501 fUsePhase1 = (pNode->tRequired[0].Worst > tWorst0Using1 + 3*p->pSuperLib->tDelayInv.Worst + p->fEpsilon); 00502 } 00503 else if ( p->fMappingMode == 3 || p->fMappingMode == 4 ) 00504 { 00505 fUsePhase0 = (pNode->tRequired[1].Worst > tWorst1Using0 + p->fEpsilon); 00506 fUsePhase1 = (pNode->tRequired[0].Worst > tWorst0Using1 + p->fEpsilon); 00507 } 00508 if ( !fUsePhase0 && !fUsePhase1 ) 00509 return; 00510 00511 // if replacement is possible both ways, use the one that works better 00512 if ( fUsePhase0 && fUsePhase1 ) 00513 { 00514 if ( pMatchBest0->AreaFlow < pMatchBest1->AreaFlow ) 00515 fUsePhase1 = 0; 00516 else 00517 fUsePhase0 = 0; 00518 } 00519 // only one phase should be used 00520 assert( fUsePhase0 ^ fUsePhase1 ); 00521 00522 // set the corresponding cut to NULL 00523 if ( fUsePhase0 ) 00524 { 00525 // deref phase 1 cut if necessary 00526 if ( p->fMappingMode >= 2 && pNode->nRefAct[1] > 0 ) 00527 Map_CutDeref( pNode->pCutBest[1], 1 ); 00528 // get rid of the cut 00529 pNode->pCutBest[1] = NULL; 00530 // ref phase 0 cut if necessary 00531 if ( p->fMappingMode >= 2 && pNode->nRefAct[0] == 0 ) 00532 Map_CutRef( pNode->pCutBest[0], 0 ); 00533 } 00534 else 00535 { 00536 // deref phase 0 cut if necessary 00537 if ( p->fMappingMode >= 2 && pNode->nRefAct[0] > 0 ) 00538 Map_CutDeref( pNode->pCutBest[0], 0 ); 00539 // get rid of the cut 00540 pNode->pCutBest[0] = NULL; 00541 // ref phase 1 cut if necessary 00542 if ( p->fMappingMode >= 2 && pNode->nRefAct[1] == 0 ) 00543 Map_CutRef( pNode->pCutBest[1], 1 ); 00544 } 00545 }