Other Novel Actuators
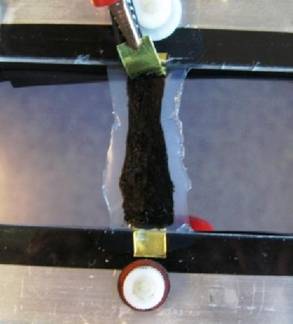
Top view of a dielectric elastomer actuator mounted in a adjustable frame. The copper foil makes electrical contact to the black strip in the middle, which is one of the two actuating electrodes
My interest in Dielectric Elastomer Actuators is mainly on the application side, motivated by the needs of our collaborators, such as Prof. Joseph Yans Robo-dragonfly and Prof. William Megills Robo-minnow.
Beside my work on carbon nanotube actuators, I have contributed to the development of various types of artificial muscles such as conducting polymer actuator and dielectric elastomer actuators. Conducting polymer (CP) actuators are another class of ionic artificial muscles that actuate electrochemically using principles similar to those of carbon nanotube actuators. My main areas of interest about CPs currently covers their actuation mechanisms, their ability to sense mechanical forces acting on them during actuation (self-sensing) and the dependence of their electro-mechanical properties (such as their tensile modulus and electrochemical capacitance) on their oxidation state.
Prof. John Madden and Joseph Yan, observing flight patterns of a real dragonfly for future application in a robotic version

Tissaphern Mirfakhrai