 |
2-DOF Acrobot The motion of a free flying robot is governed by the law of conservation of angular momentum. This law can be formulated in terms of a differential equation on the rate of rotation of the different joints of the robot. The differential equation thus obtained, cannot be directly integrated to give an algebraic relation among these angles. Such a system is called a nonholonomic system. The objective in this project was to find a suitable maneuver for the robot, so that it can land in a vertical posture, when hitting the surface. Two methods were considered. A variational approach, where the control input was parameterized and optimization of these parameters gave the desired maneuver. In the second approach, the system was transformed into a polynomial system, by a diffeomorphism which preserved the Lie-algebraic structure of the system around its point of singularity. |
 |
CEDRA Shrimp Prototype I The objective of this project was to study different mechanisms which are suitable for search and rescue operation, after an earthquakes hits. The shrimp mechanism was first developed at EPFL, Switzerland. In this project we studied this mechanism to find its cons and pros. Two prototypes were developed, and the second prototype won the second prize at the Robocup 2003 Real Rescue League. |
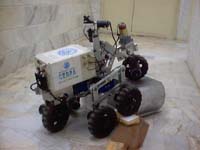 |
CEDRA Shrimp Prototype II The objective of this project was to study different mechanisms which are suitable for search and rescue operation, after an earthquakes hits. The shrimp mechanism was first developed at EPFL, Switzerland. In this project we studied this mechanism to find its cons and pros. Two prototypes were developed, and the second prototype won the second prize at the Robocup 2003 Real Rescue League. |
 |
Educational 5-DOF Manipulator The aim of this project was to develop an educational manipulator, to teach graduate students in the Dep. of Mech. Eng. how to operate a robot, how to use a teach pendant, and how to program a robot to perform a certain task repeatedly. The robot was developed for the laboratory of mechatronics. |
 |
Pole Climbing Robot (UT-PCR) In large cities, air pollution causes dirt to accumulate on the glass bulbs of the lighting systems. In order to maintain the standard lighting in the highways, these bulbs have to be cleaned on a regular basis. The conventional method of cleaning in which a van with a lift parks in the high-speed lane, and a worker cleans the bulb by hand, is both dangerous for the worker, and traffic disturbing. To address this issue a robot was developed which was capable of climbing the pole, and cleaning the bulbs. The mechanism was specially designed to be fail-safe, fast, and capable of climbing poles with different cross sections. This project was funded by Tavanir, the governmental organization in charge of power generation and distribution in Iran. |
 |
Multi-purpose Mobile Robot (intelligent vacuum cleaner) The aim of this project is to develop different technologies for the robotics industry, and test them on a mobile robot platform. A real-time software based on RT-Linux has been developed, which gives the end user the ability to develop all the algorithms in a block diagram. The program automatically generates the necessary codes for the RT-Linux. Machine Vision algorithms are also being tested on this platform. Ultrasonic sensors, for ranging are another feature of this project. Simple algorithms for complete coverage of an area with obstacles, is also one of the goals. |
In the Name of God

![]()
![]()
![]()
![]()
![]()
![]()
![]()