Ph.D. Research
“Needle Motion Simulation and Planning for Applications in Soft Tissues.”

Ph.D. Research“Needle Motion Simulation and Planning for Applications in Soft Tissues.”
|
|
One of the most common procedures employed in modern clinical practice is the subcutaneous insertion of needles and catheters; however, such procedures can be extremely difficult to perform and to learn, particularly when deep insertions into soft tissues are required.
|
|
|
|
|
|
Complications arising from poor needle placement have been studied in biopsy, brachytherapy and particularly in anaesthesia. These include false diagnosis, incorrect medication or radiation dose, longer procedure times, patient discomfort and tissue damage. This research addresses the modelling and simulation of needle insertion mechanics for analysis, training and planning. Contributions have been made in the following areas:
Models for needle insertion simulation and
manipulation systems have been reported before; however, most have been built
using largely phenomenological and heuristic models that have not been
validated, and that are not generalizable. Needle insertion forces have been
measured in prior work, e.g. using gelatine, ex vivo porcine and human
samples; however, only the resultant force acting at the proximal end of the
needle was measured in each case. While perhaps effective for the simulation of
predominantly 1-DOF problems, these approaches may not be suitable for problems
involving more complex soft tissue anatomy, needle placement optimisation,
trajectory planning and automatic control, where more detailed verifiable
knowledge of the biomechanical interaction between surgical needles and soft
tissues is required. In reality, penetration forces are distributed along the
entire length of the needle axis, resulting from physical phenomena such as
cutting/fracture, sliding, friction, stick-slip friction, tissue deformation,
tissue displacement and peeling. The needle driving forces measured previously
are the integration of this force distribution along the needle shaft.
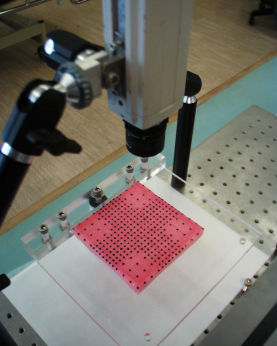
We have developed a new methodology for estimating the force distribution that occurs along a needle shaft during insertion experiments, without having to resort to a complex instrumentation approach. An experimental system for measuring the deformation of planar tissue phantoms during needle insertions has been developed.
|
|
|
|
|
|
|
|
|
A two-dimensional linear elastostatic material model, discretised using the Finite Element Method, is used to derive contact force information that is not directly measurable. This approach provides a method for quantifying the needle forces and soft tissue deformations that occur during general needle trajectories in multiple dimensions. It is a general methodology that may also be used for in vivo measurements, subject to the availability of a suitable imaging modality.
|
|
|
|
|
|
·
Numerical model simulation
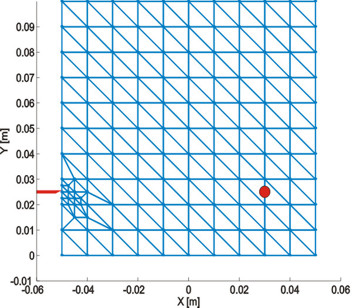
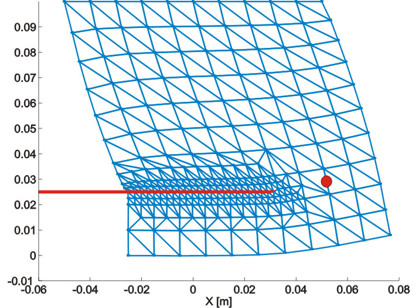
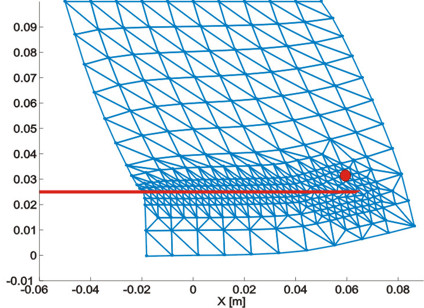
Shaft forces taken from the distributions determined using the model-based estimation approach are applied to the nodes of a FEM-based elastostatic tissue model as contact boundary conditions. This allows us to simulate needle insertion mechanics for arbitrary puncture trajectories, with multiple degrees of freedom. Complex inhomogeneous tissue domains and flexible needle models are also simulated. Novel mesh adaptation and boundary condition updates have been developed to simulate needle-tissue contact mechanics.
|
|
|
|
·
Haptic controller design and real-time model computation
A real-time interactive version of the simulation model has been developed. Large numerical systems, such as those produced when discretising elliptic PDE’s using Finite Element Analysis, can be extremely computationally demanding, particularly if they are to be solved at the sample rates required for haptics. Fast model computation has been achieved using a pre-computation step; a condensation technique to reduce dimensionality; low rank updates for fast matrix inversion after boundary condition changes or local coordinate system changes; and a matrix update scheme that is based on the continuously evolving needle-node contacts.
The algorithm was implemented using a real-time system and a three-degree-of-freedom planar haptic interface. Interactive puncture of two-dimensional tissue models containing more than 400 mesh nodes is easily simulated at a controller sample rate of 500Hz. In addition, because the boundary conditions occurring at the needle-tissue interface is based upon shaft force distributions that were determined experimentally, the haptic simulation feels extremely realistic.
|
|
|
|
|
|
A novel control approach was developed for haptic simulation. It adopts the four-channel control architecture that was first proposed for teleoperation, in order to realise transparency between the haptic interface and the physical models in the virtual environment. The effectiveness of this approach was demonstrated using a new haptic interface mechanism that was designed and built in the Robotics and Control Laboratory at UBC. This work was demonstrated at the 1999 IRIS/Precarn conference in Toronto, and won the best demonstration award at the conference.
·
Steering and motion control for targeting
Surgical needle placement is usually performed using straight-line needle trajectories, due to the absence of feedback that would make trajectory updates feasible. It is surmised that even when good medical images are available during a procedure, too little is known about needle steering mechanics to facilitate trajectory compensation. Instead, the needle insertion point and orientation are selected in order to set up a straight-line intercept of the target anatomy. If it is determined that a needle fails to reach its goal location, due to tissue or needle motion, then it must be retracted and re-inserted. Several attempts may be required before success is achieved.
The needle insertion models developed in this research have been used to study the needle motion-planning problem. The concept of needle manipulability or “steerability” has been introduced in order to consider closed-loop needle trajectory compensation, as well as trajectory planning and optimization. A needle manipulation Jacobian expresses the relationship between needle tip motion, with respect to the target location, and applied needle base motion.

This is used in conjunction with a potential field-based motion-planning algorithm to automatically plan feasible needle trajectories in soft tissue environments.
|
|
|
|
|
|
|
|
|
Simon DiMaio, October 2002