Design of magnetically levitated vibration isolation
platform
[With research engineer Niall
Parker and Canadian Astronaut Bjarni
Tryggvason . Supported by the Canadian
Space Agency .]
 Scientific experiments and manufacturing in many areas, such as materials
and fluids, can benefit from the removal of vibrations and gravity-induced
accelerations. Even in the free-fall or zero-g environments available
to researchers, such as parabolic flights or orbital flights, trajectory
errors (such as not executing a perfect flight parabola) and disturbances
(such as crew-motion or thruster-induced structural vibrations) impose
acceleration levels of over 10 millig to an experimental payload,
resulting in a loss of performance for sensitive experiments. In a collaborative
project with the Canadian Space Agency, two vibration isolation systems
for zero-g environments have been developed - the Motion Isolation
Mount (MIM) for orbital flights and the Large Motion Isolation Mount (LMIM)
for parabolic flights.
Scientific experiments and manufacturing in many areas, such as materials
and fluids, can benefit from the removal of vibrations and gravity-induced
accelerations. Even in the free-fall or zero-g environments available
to researchers, such as parabolic flights or orbital flights, trajectory
errors (such as not executing a perfect flight parabola) and disturbances
(such as crew-motion or thruster-induced structural vibrations) impose
acceleration levels of over 10 millig to an experimental payload,
resulting in a loss of performance for sensitive experiments. In a collaborative
project with the Canadian Space Agency, two vibration isolation systems
for zero-g environments have been developed - the Motion Isolation
Mount (MIM) for orbital flights and the Large Motion Isolation Mount (LMIM)
for parabolic flights.
 The approach taken for MIM has been to develop a mechanism having two parts:
a stator attached to the structure and a payload-carrying flotor, with
the only coupling between the two components being a flexible umbilical
carrying signals and power to the flotor. The flotor is actively magnetically
levitated by a set of wide-gap voice coil actuators. Its position relative
to the stator is sensed by an optical position sensor while its absolute
acceleration is sensed by an inertial accelerometer system. A digital controller
uses the sensed information to compute actuator currents based on a control
law that regulates acceleration and steady-state position to zero. The
weak coupling between stator and flotor and the insensitivity of actuator
force with position makes such a system extremely effective for vibration
isolation [Salcudean et al, 1992],
[Hollis and Salcudean, 1993]. A prototype following our design has
been built by MPB Technologies in Pointe Claire, Quebec, and is now flying
on the Priroda module on MIR. A second prototype, MIM2, was constructed
under contract by the Canadian Space Agency and flown by astronaut
Bjarni Tryggvason on shuttle flight STS-85.
The approach taken for MIM has been to develop a mechanism having two parts:
a stator attached to the structure and a payload-carrying flotor, with
the only coupling between the two components being a flexible umbilical
carrying signals and power to the flotor. The flotor is actively magnetically
levitated by a set of wide-gap voice coil actuators. Its position relative
to the stator is sensed by an optical position sensor while its absolute
acceleration is sensed by an inertial accelerometer system. A digital controller
uses the sensed information to compute actuator currents based on a control
law that regulates acceleration and steady-state position to zero. The
weak coupling between stator and flotor and the insensitivity of actuator
force with position makes such a system extremely effective for vibration
isolation [Salcudean et al, 1992],
[Hollis and Salcudean, 1993]. A prototype following our design has
been built by MPB Technologies in Pointe Claire, Quebec, and is now flying
on the Priroda module on MIR. A second prototype, MIM2, was constructed
under contract by the Canadian Space Agency and flown by astronaut
Bjarni Tryggvason on shuttle flight STS-85.

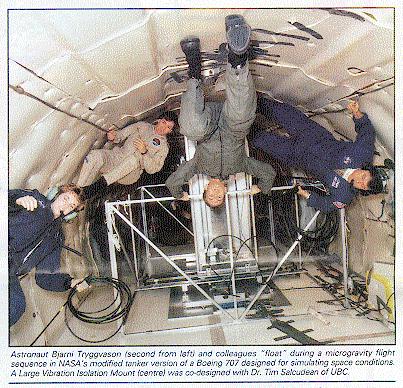 Parabolic flights have residual acceleration errors of the order of 100
millig that correspond to aircraft trajectory errors of 1-2 meters.
A system such as MIM could not accommodate such a large travel due to the
limited size of the actuators. Therefore, we proposed a course-fine approach,
or LMIM, in which the stator of the MIM device is transported by a large
robot or motion stage. A one-degree-of-freedom
prototype consisting of a motor-driven linear stage and the UBC maglev
wrist has been built to demonstrate the feasibility of the approach. Photograph
shows LMIM in a parabolic flight.
Parabolic flights have residual acceleration errors of the order of 100
millig that correspond to aircraft trajectory errors of 1-2 meters.
A system such as MIM could not accommodate such a large travel due to the
limited size of the actuators. Therefore, we proposed a course-fine approach,
or LMIM, in which the stator of the MIM device is transported by a large
robot or motion stage. A one-degree-of-freedom
prototype consisting of a motor-driven linear stage and the UBC maglev
wrist has been built to demonstrate the feasibility of the approach. Photograph
shows LMIM in a parabolic flight.
Work on control algorithms for the above
or other active isolation systems is being carried out.
 Scientific experiments and manufacturing in many areas, such as materials
and fluids, can benefit from the removal of vibrations and gravity-induced
accelerations. Even in the free-fall or zero-g environments available
to researchers, such as parabolic flights or orbital flights, trajectory
errors (such as not executing a perfect flight parabola) and disturbances
(such as crew-motion or thruster-induced structural vibrations) impose
acceleration levels of over 10 millig to an experimental payload,
resulting in a loss of performance for sensitive experiments. In a collaborative
project with the Canadian Space Agency, two vibration isolation systems
for zero-g environments have been developed - the Motion Isolation
Mount (MIM) for orbital flights and the Large Motion Isolation Mount (LMIM)
for parabolic flights.
Scientific experiments and manufacturing in many areas, such as materials
and fluids, can benefit from the removal of vibrations and gravity-induced
accelerations. Even in the free-fall or zero-g environments available
to researchers, such as parabolic flights or orbital flights, trajectory
errors (such as not executing a perfect flight parabola) and disturbances
(such as crew-motion or thruster-induced structural vibrations) impose
acceleration levels of over 10 millig to an experimental payload,
resulting in a loss of performance for sensitive experiments. In a collaborative
project with the Canadian Space Agency, two vibration isolation systems
for zero-g environments have been developed - the Motion Isolation
Mount (MIM) for orbital flights and the Large Motion Isolation Mount (LMIM)
for parabolic flights.

