
|
Mohammad Najafi |
|
PhD Candidate, ECE Dept, University of British Columbia |
|
Projects |
|
Simplicity can be achieved using our proposed differential single-wall calibration that does not require a special calibration phantom. Even the bottom of a water tank can serve as a phantom. |

|
Ultrasound Calibration In all the clinical applications that use freehand tracked ultrasound, one main challenge is to precisely locate the ultrasound image pixels with respect to a tracking sensor on the transducer. This process is called spatial Calibration. |
|
The most accurate ultrasound calibration is made possible with our proposed differential method using a multi-wedge phantom.
|

|
Single Camera Closed-form Real-time Needle Tracking for Ultrasound-Guided Needle Insertion:
|
|
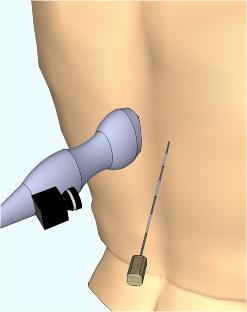
The effectiveness of a treatment in percutaneous procedures and the success or precision of a diagnosis is highly dependent on the accuracy of percutaneous insertion.
A single camera mounted on the ultrasound transducer is proposed to track the needle in real-time for real-time guidance and trajectory planning during an ultrasound-guided needle insertion procedure. |
|
Ultrasound Calibration using a Single-Wall Phantom:
|
|
Ultrasound Calibration using a Multi-wedge Phantom: |