|
SIX-LEG MOBILE ROBOT |
![]()
THIS ROBOT IS UNDER CONSTRUCTION
As an
active member of the Vancouver Robotic Club, I am developing a six-leg mobile
robot in my spare time. The chassis
of the robot, as shown in Figure 1, is purchased from Lynxmotion
and I am designing and implementing some of the hardware and software
components of the robot but not the mechanical parts. Javelin
Stamp, a 24-pin DIP module programmed in a subset of the Sun Microsystems
Java language, is employed in controlling motion of the robot and
the embedded software is written in Java.
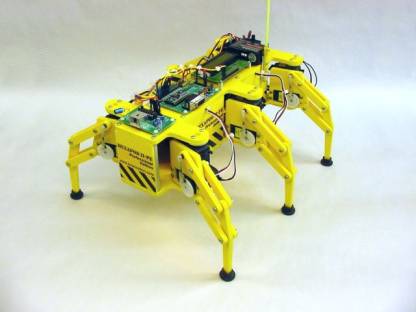
Figure
1. Chassis of a six-leg mobile
robot
The robot is controlled
by a PC via a wireless serial communication port and the controlling
software in the PC is also written in Java.
With the release of Java
Communications API, it is relatively easy to develop platform independent
communication software. The GUI of
the software, as shown in Figure 2, has been implemented and will be modified if
necessary.
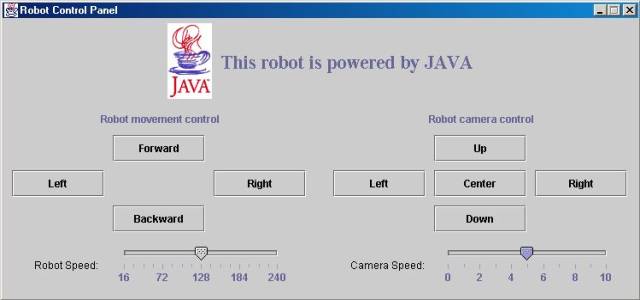
Figure
2. GUI of controlling
software in a PC
My design idea is to
keep the robot brainless. The
controlling software in the PC carries out decision-making and the
embedded software in the robot controls robot movement only; the
PC is the master and the robot is the slave.
This master-slave relationship makes design, implementation, and
debugging easier.
Please come back to this page for the
latest development of the robot. I shall make the page as the documentation of the six-leg
mobile robot to share with other robot enthusiasts in the world.
Feel free to give me any comments or suggestions concerning my robot
design at georgew@ece.ubc.ca.
If you are living in
Vancouver and would like to purchase amateur robot components, please go to the Vancouver
Robotic Ltd. I purchase most of
the robot components from this store and the technical support is excellent.
Last update: March 26, 2003